ربات های بین پیکینگ (جمع آوری اشیا نامنظم) با بی نظمی زنجیره تأمین مقابله می کنند

همانطور که تولیدکنندگان همچنان به دلیل پایینترین نرخ بیکاری در تاریخ، با مشکل یافتن کارگر در تمامی بخشها مواجه هستند، اتوماسیون دیگر یک امر لوکس نیست، بلکه ضروری است.
ربات های بین پیکینگ(جمعآوری اشیا نامنظم)
همانطور که تولیدکنندگان همچنان به دلیل پایینترین نرخ بیکاری در تاریخ، با مشکل یافتن کارگر در تمامی بخشها مواجه هستند، اتوماسیون دیگر یک امر لوکس نیست، بلکه ضروری است. تحقیقات اخیر انجامشده توسط مؤسسه نیروی کار در UKG نشان داده که قبل از همهگیری، تقریباً ۳۸ درصد از تولیدکنندگان برای یافتن نیروی کار مناسب با مشکل مواجه بودند، اما این رقم اکنون به ۵۴ درصد افزایش یافته است. با توجه به این اعداد، اعمال اتوماسیون انعطافپذیر به شکل ربات های بین پیکینگ با بینایی (VGR) برای برداشتن اشیا نامنظم، مزایای زیادی دارد.
واگذاری جابهجایی مواد کثیف یا خطرناک به یکی از انواع ربات های بین پیکینگ (AMR) یا یک ربات همکار منعطف برای برداشتن اشیا نامنظم، مشاغل را ایمنتر و آسانتر میکند. همچنین زمان کارمندان را آزاد میکند تا روی کارهای جذابتر و با ارزش افزوده تمرکز کنند و در نتیجه منجر به کارآمدی و بهره وری بیشتر عملیات کلی تولید و انبارداری میشود. برداشتن خودکار اشیا نامنظم میتواند به تولیدکنندگان در مقابله با چالشهای مختلف از جمله کمبود نیروی کار، حجم بالای سفارش و اختلال در زنجیره تامین کمک کند.
مسائل کارگری فراوان است مسائل کارگری فراتر از کمبودهای ذکر شده در بالا است. نرخ بالای جابهجایی در عملیات تولید و انبارداری میتواند منجر به کمبود نیروی کار ماهر در یک شرکت و نیاز به جذب و آموزش مداوم کارمندان جدید شود.
کمبود نیروی کار همچنین میتواند بر برنامههای تولید تأثیر بگذارد. شرکتهای کمکارمند اغلب باید به کارمندان پرکار تکیه کنند که منجر به افزایش حوادث منجر به جراحت کارکنان و آسیب به تجهیزات میشود و باعث تأخیر و افزایش هزینه میشود. تمام این چالشهای کارگری وقتگیر و پرهزینه هستند و بر توانایی کسبوکار برای عملکرد کارآمد و مؤثر تأثیر منفی میگذارند.
علاوه بر مسائل کارگری، زنجیره تامین فعلی با هرج و مرج و چرخش دائمی در تقریباً هر جبهه دیگری روبرو است. چالشها شامل افزایش تقاضا و افزایش نرخ حملونقل، و همچنین اختلالات ناشی از موجودی غیرقابل پیشبینی و عدم قطعیت انتظارات در حال تحول خدمات مشتری است.
ابهامات
حجم سفارش بالاتر، موجودی و ترکیب محصولات غیرقابل پیشبینی و انتظارات در حال تحول خدمات مشتری، همگی بر عملیات تولید و انبارداری تأثیر میگذارند. کسبوکارها ممکن است برای پاسخگویی به حجم سفارشهای بالاتر، نیاز به تولید و ذخیرهسازی محصولات بیشتری داشته باشند که این امر میتواند منابع موجود را تحت فشار قرار دهد و هزینهها را افزایش دهد. تنظیم مداوم تولید و انبارداری برای برآوردن تقاضای در حال تغییر، در عین حال که با تغییرات ترکیبی محصول و در دسترس نبودن موجودی غیرقابل پیشبینی سروکار دارید، میتواند وقتگیر و پرهزینه باشد. با این وجود، مشتریان انتظار دارند که کسبوکارها زمان تحویل سریعتر، خدمات شخصیسازیشده و سایر خدمات با ارزش افزوده را ارائه دهند که همه اینها نیازمند عملیات کارآمدتر و انعطافپذیرتر است.
تمام این عوامل میتوانند با افزایش هزینهها، کند شدن تولید و کاهش کلی بهرهوری، بر عملیات تولید و انبارداری تأثیر بگذارند. برای مقابله با این چالشها، کسبوکارها باید استراتژیها و فناوریهایی مانند برداشتن سطل را اتخاذ کنند که به آنها در مدیریت مؤثرتر موجودی، سادهسازی عملیات و بهبود چابکی و انعطافپذیری کلی کمک کند.
جزئیات اختلال در زنجیره تامین
رشد سریع تجارت الکترونیک و ظهور تکمیل سفارش در سطح کالا به این معنی است که کسبوکارها باید تعداد بیشتری از سفارشهای کوچکتر را مدیریت کنند که میتواند پیچیدهتر و زمانبرتر از رسیدگی به سفارشهای بزرگتر باشد. این امر با افزایش تقاضا برای زمانهای تحویل کوتاهتر، باعث اختلال در عملیات تولید و انبارداری میشود. برای پاسخگویی به این تقاضا، کسبوکارها در حال اتخاذ فناوریهای جدید و راهحلهای نوآورانه مانند اتوماسیون، برداشتن سطل و تجزیه و تحلیل دادهها هستند. نوآوریهای فناوری همچنین نحوه عملکرد کسبوکارها را تغییر میدهد، زیرا ابزارها و سیستمهای جدیدی معرفی میشوند که نیازمند مهارتها و دانش جدید هستند. فشار بر روی عملیات تولید و انبارداری برای چابکتر، کارآمدتر و انعطافپذیرتر شدن برای همگام شدن با نیازهای در حال تغییر مشتریان و بازار است. در نتیجه، کسبوکارها باید در فناوریها و فرآیندهای جدید سرمایهگذاری کنند و کارکنان خود را بهطور پیشگیرانه در مورد مهارتهای جدید آموزش دهند.
سه نوع برداشتن اشیا نامنظم
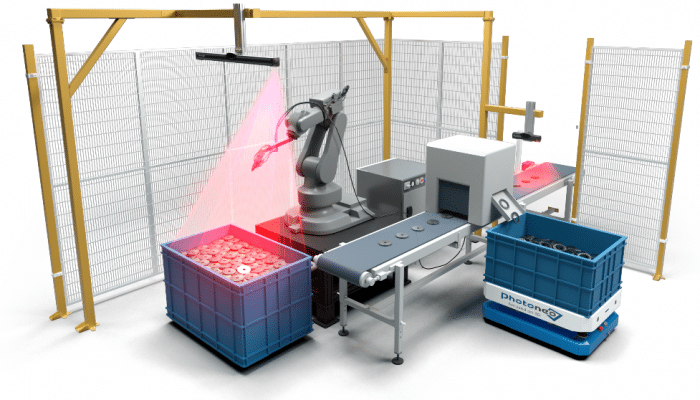
برداشتن خودکار اشیا نامنظم با ربات، فرآیندی که در آن ربات از حسگرها و دوربینها برای شناسایی و انتخاب یک آیتم از سطل یا ظرف استفاده میکند، میتواند به عملیات تولید و انبارداری برای مقابله با تمام این چالشها کمک کند. بازوی ربات برای یافتن و گرفتن شی مورد نظر برنامه ریزی شده است و سپس آن را برای پردازش بیشتر یا بسته بندی به مکان یا دستگاه دیگری منتقل می کند. این سیستم می تواند برای کار با انواع اشیاء و ظروف طراحی شود و به چیدن کارآمد و دقیق اقلام در محیط تولید، ساخت یا لجستیک کمک کند.
فناوری برداشتن اشیا نامنظم VGR برای پاسخگویی به تمام نیازهای تولید طراحی شده است. سه نوع برداشتن اشیا نامنظم وجود دارد: ساختاریافته، نیمه ساختاریافته و غیرساختاریافته.
برداشتن اشیا نامنظم ساختاریافته شامل استفاده از ظروف از پیش تعریف شده با اقلام سازماندهی شده است که با الگوی ثابتی چیده شده اند. ربات به راحتی می تواند اقلام را شناسایی و برداشت کند زیرا آنها در مکان ثابتی قرار دارند و ربات میداند کجا باید آنها را پیدا کند.
برداشتن اشیا نامنظم نیمه ساختاریافته شامل اشیایی است که به طور تصادفی در یک ظرف قرار می گیرد قرارگیری خاصی از نظر جهت گیری یا شکل آنها وجود دارد. ربات ممکن است برای مکان یابی اشیاء به سنسورها یا دوربین های اضافی نیاز داشته باشد، اما پس از شناسایی آنها، می تواند با استفاده از حرکات برنامه ریزی شده آنها را بردارد.
برداشتن اشیا نامنظم غیرساختاریافته شامل اشیاء با اشکال، اندازه ها و جهت گیری های مختلف است که به طور تصادفی قرار گرفته اند. این نوع برداشت اشیا نامنظم چالش برانگیزترین است، زیرا ربات باید از سنسورها و الگوریتم های پیشرفته برای شناسایی و مکان یابی اشیاء استفاده کند. برای اطمینان از برداشتن موفق، ممکن است به مراحل اضافی مانند تغییر جهت جسم نیاز باشد.
تقاضا برای ربات های بین پیکینگ تا سال ۲۰۳۰ جهش خواهد کرد
گزارشی از Interact Analysis نشان می دهد که تقاضای بازار برای ربات های بین پیکینگ در انبارها به طور قابل توجهی افزایش خواهد یافت و پیش بینی می شود محموله ها از کمتر از 2000 دستگاه در سال 2022 به بیش از 50000 دستگاه در سال تا پایان دهه افزایش یابد. این شرکت مستقر در بریتانیا پیش بینی می کند که افزایش هزینه نیروی کار و کاهش هزینه ربات ها منجر به نصب حدود 150000 ربات برداشتن تا سال 2030 شود. این روند با کمبود نیروی کار، افزایش دستمزد و پیشرفت در هوش مصنوعی (AI) و فناوری دید ماشین هدایت خواهد شد.
به دلیل مشکلات نیروی کار زنجیره تامین، گلوگاه ها، ابهامات و اختلالات، تولیدکنندگان و انبارها باید دارای عملیات انعطافپذیر و چابکی باشند که بتوانند به سرعت با تغییرات تقاضا سازگار شوند. آنها ممکن است نیاز به انباشت انبوهی از کالا داشته باشند که می تواند پرهزینه باشد و فضا اشغال کند. مشاغل باید قادر باشند خدمات سریع، قابل اعتماد و شخصی سازی شده را به مشتریان خود ارائه دهند. این امر بر کسب و کارها فشار وارد می کند تا نه تنها زمان تولید و تحویل را سرعت بخشند، بلکه دقت ارسال را نیز تضمین کنند.
به نظر می رسد همه این عوامل با افزایش پیچیدگی و هزینه عملیات تولید و انبارداری علیه تولیدکنندگان عمل می کنند. برای کسب و کارهایی که می توانند به طور مؤثر با این چالش ها مقابله کنند، فرصت هایی برای کسب مزیت رقابتی در بازار تجارت الکترونیک فراهم می شود.
سیستمهای چیدن و بستهبندی خودکار که توسط AMRها و ربات های برداشتن اشیا فعال میشوند، به تولیدکنندگان کمک میکنند تا با بسیاری از تغییرات رخ داده در تولید مقابله کرده و مدیریت حملونقل سریع حجم زیادی از سفارشهای کوچکتر را بهتر مدیریت کنند.
ربات های بین پیکینگ(جمعآوری اشیا نامنظم) دوبات رباتیک
در حالی که ممکن است دوبات راهحلهای خاصی برای برداشتن اشیا نامنظم به طور مستقیم ارائه ندهد، به احتمال زیاد فناوری آنها را میتوان برای این منظور تطبیق داد. در اینجا دلایل آن را ذکر میکنیم:
رباتهای مشترک دوبات (Cobots)
دوبات رباتهای همکار (Cobots) را ارائه میدهد که برای همکاری ایمن با انسان طراحی شدهاند. این رباتها اغلب برای کارهایی مانند مونتاژ و جابجایی مواد استفاده میشوند که اجزای کلیدی برداشتن اشیا نامنظم هستند.
ادغام سیستمهای دیداری
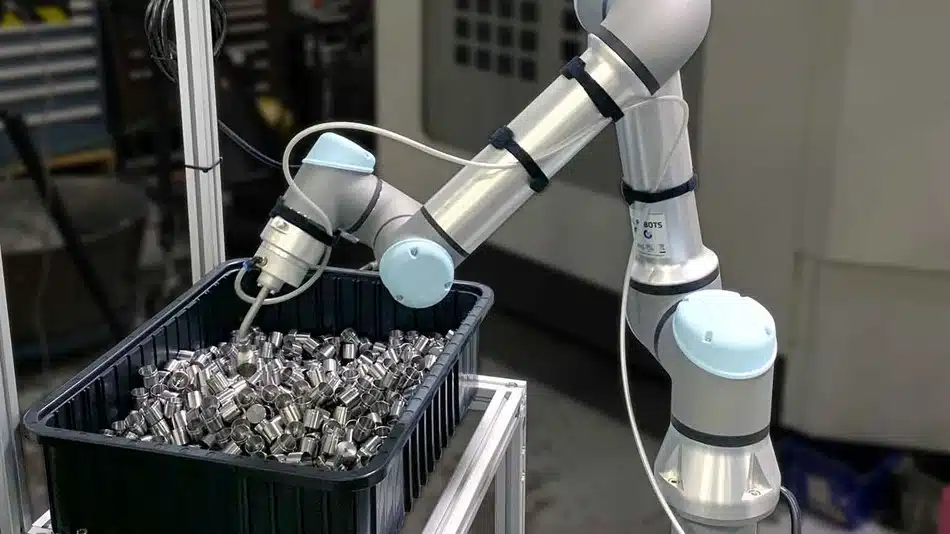
بسیاری از تولیدکنندگان ربات همکار، از جمله دوبات، امکان ادغام با سیستمهای دیداری خارجی را فراهم میکنند. این سیستمهای دیداری برای کاربردهای برداشتن اشیا نامنظم حیاتی هستند. دوربینی که روی بازوی ربات دوبات نصب شده است میتواند اشیاء داخل سطل را شناسایی کند و به ربات اجازه دهد تا آنها را به طور دقیق grasp کند (بردارد).
برنامهنویسی ربات
رباتهای مشترک دوبات معمولاً برای انجام کارهای خاصی برنامهریزی میشوند. برای برداشتن اشیا نامنظم، این برنامهنویسی شامل آموزش ربات برای شناسایی اشیاء، گرفتن آنها به طور ایمن و قرار دادن آنها در مکان تعیینشده میشود.
در اینجا نحوهی بالقوه استفاده از رباتهای دوبات برای برداشتن اشیا نامنظم آورده شده است:
- انتخاب مدل دوبات: دوبات طیف وسیعی از کوبات ها را با ظرفیت حمل بار و قابلیتهای دسترسی ارائه میدهد. مدل خاص انتخاب شده بستگی به وزن، اندازه و نوع اشیایی دارد که از سطل برداشته میشوند.
- ادغام سیستم دیداری: یک سیستم دیداری مناسب انتخاب شده و با ربات دوبات ادغام میشود. این سیستم برای شناسایی اشیاء داخل سطل آموزش داده خواهد شد.
- برنامهنویسی ربات: ربات دوبات برای دنبال کردن یک توالی خاص برنامهریزی میشود:
- استفاده از سیستم دیداری برای مکانیابی یک شیء
- حرکت دادن بازوی ربات به محل شیء
- تنظیم گیرنده برای گرفتن ایمن شیء
- بلند کردن و انتقال شیء به مکان تعیینشده
به طور کلی، در حالی که دوبات ممکن است راهحل پیشساختهشدهای برای برداشتن سطل نداشته باشد، کوبات های آنها میتوانند گزینه مناسبی برای کسانی باشند که به دنبال ساخت یک راهحل سفارشی هستند.
در اینجا چند نکتهی اضافی برای در نظر گرفتن آورده شده است:
- پیچیدگی برداشتن سطل: پیچیدگیِ کاربرد برداشتن اشیا نامنظم به عواملی مانند تنوع اشیاء، سازماندهی آنها در سطل و سرعت و دقت مورد نیاز بستگی دارد.
- تخصص ادغام: ادغام سیستم دیداری و برنامهنویسی ربات برای برداشتن اشیا نامنظم ممکن است نیاز به تخصص خاص در زمینه رباتیک داشته باشد.
اگر علاقهمند به بررسی رباتهای دوبات برای برداشتن اشیا نامنظم هستید، با ما تماس بگیرید
منبع:





