انواع ربات صنعتی و کاربردهای آنها

شرکت های بی شماری از ربات های صنعتی برای خودکارسازی وظایف، افزایش ایمنی کارکنان و افزایش تولید کلی در حالی که ضایعات و هزینه های عملیاتی را کاهش می دهند استفاده می کنند.
شرکت های بی شماری از ربات های صنعتی برای خودکارسازی وظایف، افزایش ایمنی کارکنان و افزایش تولید کلی در حالی که ضایعات و هزینه های عملیاتی را کاهش می دهند استفاده می کنند. با افزایش استفاده از انواع ربات صنعتی در محیط های تولیدی، تقاضا برای انواع مختلف ربات های صنعتی برای تناسب با کاربردها و صنایع خاص افزایش یافته است. در این پست، ما انواع ربات های صنعتی موجود در بازار، نحوه عملکرد آنها و کاربردها یا صنایعی که معمولاً در آنها استفاده می شوند را بررسی خواهیم کرد.
انواع ربات صنعتی
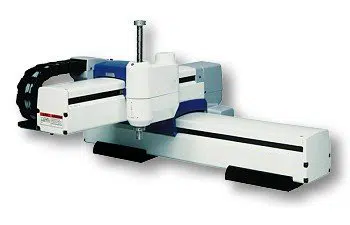
ربات کارتیزین
ربات های کارتیزین، که همچنین به عنوان ربات های خطی یا ربات های گنتری شناخته می شوند، ربات های صنعتی هستند که روی سه محور خطی کار می کنند که از سیستم مختصات دکارتی (X، Y و Z) استفاده می کنند، به این معنی که آنها در خطوط مستقیم روی 3 محور حرکت می کنند ( بالا و پایین، داخل و خارج و کنار به کنار). ربات های کارتیزین به دلیل انعطاف پذیری بالا در پیکربندی های خود، به کاربران امکان تنظیم سرعت، دقت، طول کورس و اندازه ربات را می دهند. ربات های کارتیزین یکی از رایج ترین انواع ربات ها برای کاربردهای صنعتی هستند و اغلب برای ماشین های CNC و چاپ سه بعدی استفاده می شوند.
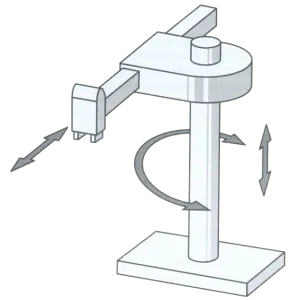
ربات SCARA
SCARA مخفف Selective Compliance Assembly Robot Arm یا Selective Compliance Articulated Robot Arm است. ربات های SCARA روی 3 محور (X، Y و Z) کار می کنند و همچنین دارای حرکت چرخشی هستند. ربات های SCARA در حرکات جانبی بسیار خوب عمل می کنند و معمولاً سریعتر حرکت می کنند و ادغام آنها آسان تر از ربات های کارتیزین است. معمولاً از ربات های SCARA برای مونتاژ و پالت سازی و همچنین کاربردهای زیست پزشکی استفاده می شود.

ربات مفصلی
حرکت مکانیکی و پیکربندی ربات های مفصلی بسیار شبیه بازوی انسان است. بازو به پایه ای با مفصل چرخشی وصل شده است. خود بازو می تواند از دو مفصل چرخشی تا ده مفصل چرخشی که به عنوان محور عمل می کنند، داشته باشد که هر مفصل یا محور اضافی امکان درجه آزادی بیشتری را فراهم می کند. اکثر ربات های مفصلی از چهار یا شش محور استفاده می کنند. کاربردهای معمول برای ربات های مفصلی مونتاژ، جوشکاری قوس، جابجایی مواد، نگهداری ماشین و بسته بندی است.

ربات استوانه ای
ربات های استوانه ای دارای یک مفصل چرخشی در پایه و یک مفصل منشوری برای اتصال لینک ها هستند. ربات ها دارای یک پاکت کاری به شکل استوانه ای هستند که با شفت چرخان و یک بازوی قابل گسترش که در یک حرکت عمودی و لغزشی حرکت می کند، به دست می آید. ربات های استوانه ای اغلب به دلیل طراحی جمع و جور خود در فضای کاری تنگ برای مونتاژ ساده، نگهداری ماشین یا کاربردهای پوشش دهی استفاده می شوند.
ربات دلتا
ربات های دلتا، یا ربات های موازی، دارای سه بازو متصل به یک پایه واحد هستند که بالای فضای کاری نصب شده است. ربات های دلتا در یک شکل گنبدی کار می کنند و می توانند هم ظریف و دقیق و هم با سرعت بالا حرکت کنند زیرا هر مفصل از عملگر انتهایی مستقیماً توسط هر سه بازو کنترل می شود. ربات های دلتا اغلب برای کاربردهای سریع برداشتن و قرار دادن در صنایع غذایی، دارویی و الکترونیکی استفاده می شوند.

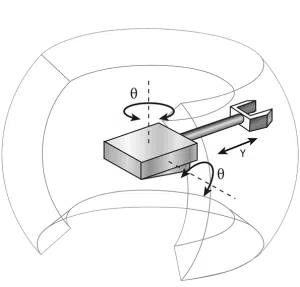
ربات قطبی
ربات های قطبی، یا ربات های کروی، دارای یک بازو با دو مفصل چرخشی و یک مفصل خطی متصل به یک پایه با مفصل چرخشی هستند. محورهای ربات با هم کار می کنند تا یک مختصات قطبی را تشکیل دهند که به ربات اجازه می دهد تا یک پاکت کاری کروی داشته باشد. ربات های قطبی به عنوان یکی از اولین انواع ربات های صنعتی که تاکنون توسعه یافته اند، شناخته می شوند. ربات های قطبی معمولاً برای ریخته گری تحت فشار، قالب گیری تزریقی، جوشکاری و جابجایی مواد استفاده می شوند.
ربات همکار
ربات های همکار یا کوبات ها ربات هایی هستند که می توانند مستقیماً و با ایمنی با انسان ها در یک فضای کاری مشترک تعامل داشته باشند. انواع و برندهای مختلفی از ربات های همکار در بازار وجود دارد – اینجا اطلاعات بیشتری کسب کنید. کوبات ها معمولاً برای برداشتن و قرار دادن، پالت سازی، بازرسی کیفیت و نگهداری ماشین استفاده می شوند.






