کوبات یا ربات همکار چیست؟ همه چیز درباره ربات های همکار

ربات همکار (کوبات) چیست؟ مزایای کوبات ها چیست؟
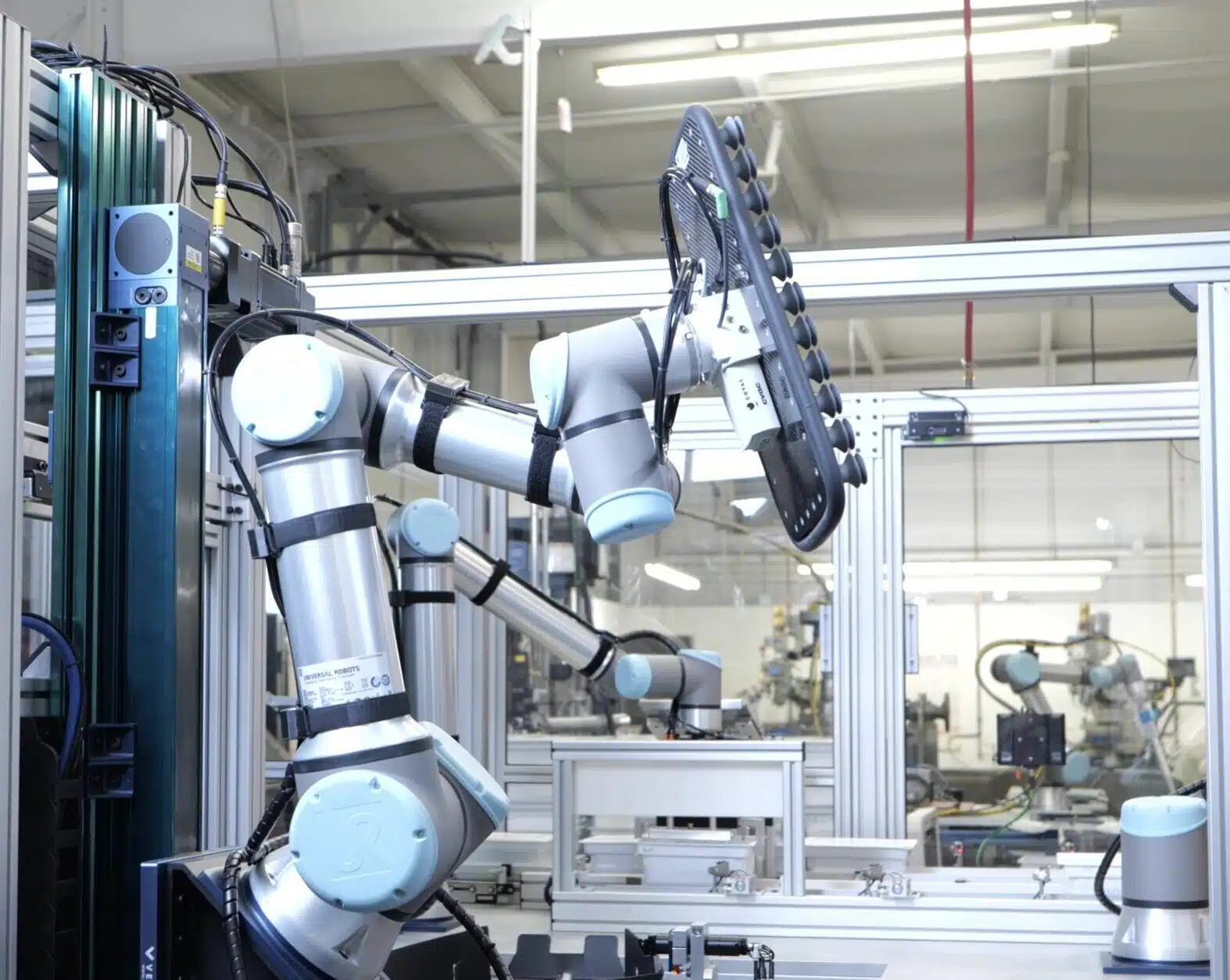
رباتهای همکار، که اغلب با نام «کوبات» (cobot) شناخته میشوند، در حال تغییر نحوه تعامل انسانها با ماشینها در خطوط تولید، آزمایشگاهها و حتی صنایع خدماتی هستند. بر خلاف رباتهای صنعتی سنتی که در پشت حفاظها یا سلولهای جداگانه کار میکنند، کوباتها طوری طراحی شدهاند که در کنار انسانها کار کنند و وظایف، فضا و اطلاعات را به اشتراک بگذارند. این مقاله، تکامل، اصول طراحی، کاربردها، مزایا، چالشها و چشمانداز آینده رباتهای همکار را بررسی میکند. در پایان این مطلب خواهید دانست که ربات همکار چیست و چگونه کار میکند، چرا به بخشی ضروری از استراتژیهای مدرن اتوماسیون تبدیل شده و چگونه آینده کار را شکل خواهد داد.
تعریف ربات همکار (کوبات)
رباتهای همکار (کوباتها) از رباتهای صنعتی سنتی به لحاظ توانایی تعامل ایمن با اپراتورهای انسانی در محیطهای مشترک متمایز میشوند. رباتهای صنعتی سنتی برای سرعت، دقت و استقامت طراحی شدهاند، اما فاقد انعطافپذیری ذاتی و مکانیزمهای ایمنی لازم برای همکاری مستقیم با انسان هستند. کوباتها، در مقابل، دارای سنسورها، نرمافزار و طراحیهای مکانیکی هستند که سرعت، نیرو و دامنه حرکتشان را تا سطوح ایمن محدود میکند. آنها میتوانند تماسهای ناگهانی با کارکنان انسانی را تشخیص دهند و بلافاصله سرعت خود را کم کرده، متوقف شوند یا مسیرشان را برای جلوگیری از صدمات تغییر دهند.
ویژگیهای کلیدی
-
ویژگیهای ایمنی
کوباتها به مکانیسمهای ایمنی مختلفی مجهزند تا تضمین شود که در هنگام تعامل با انسانها صدمهای ایجاد نمیکنند. این مکانیزمها شامل محدودسازی نیرو و توان، تشخیص برخورد و شناسایی بر مبنای دید (vision-based sensing) هستند. برای مثال، اگر بازوی یک کوبات با مانعی (مانند دست یک انسان یا جسم دیگری) برخورد کند، سنسورهای آن فوراً تماس را شناسایی کرده و در صورت لزوم توقف اضطراری یا کاهش نیرو را فعال میکنند. -
سهولت برنامهنویسی
یکی از جذابترین ویژگیهای کوباتها، رابط برنامهنویسی کاربرپسند آنهاست. بسیاری از کوباتها از طریق پنل آموزشپذیر (teach pendant)، راهنمایی دستی (که در آن یک انسان بهصورت فیزیکی ربات را از طریق یک سلسله حرکات هدایت میکند) یا رابطهای گرافیکی برنامهریزی میشوند. این موضوع مانع بزرگی که معمولاً برای شرکتهای کوچک و متوسط (SMEها) به دلیل کمبود مهندسین رباتیک وجود دارد را از بین میبرد. -
انعطافپذیری و پرتابل بودن
کوباتها اغلب کوچکتر، سبکتر و جابجایی آسانتری نسبت به رباتهای سنتی دارند. با داشتن ابزارهای انتهای بازوی ماژولار (end-of-arm tooling) و فیکسچرهای با تغییر سریع، یک کوبات میتواند در چندین وظیفه—مانند مونتاژ، بازرسی کیفیت، بستهبندی یا پالتبندی—بدون نیاز به مدت توقف طولانی یا تجهیزات نصب تخصصی مجدداً مستقر شود. -
حسگری یکپارچه
بسیاری از کوباتها دارای سنسورهای اندازهگیری نیرو-گشتاور، سیستمهای بینایی (دوربینهای دو یا سه بعدی) و گاهی سنسورهای مجاورت هستند. این توانمندی به آنها امکان میدهد تا در لحظه به تغییرات موقعیت، جهت یا شکل قطعات واکنش نشان دهند که در وظایف مونتاژ یا جابجایی اشیای غیر یکنواخت بسیار مفید است. -
طراحی انسانمحور
کوباتها بهگونهای طراحی شدهاند که به جای جایگزینی انسانها، آنها را یاری کنند. این دیدگاه انسانمحور بر تکمیل مهارتهای انسانی—نظیر چابکی دست، حل مسئله و تصمیمگیری—با ثبات، قدرت و قابلیت اطمینان رباتها تمرکز دارد. با تفویض وظایف تکراری، کسالتبار یا دارای ریسک ارگونومیک بالا به کوباتها، اپراتورهای انسانی میتوانند بر فعالیتهای ارزشمندتر متمرکز شوند.
زمینه تاریخی و تکامل
اگرچه اصطلاح «ربات همکار» (کوبات) تنها در دهه گذشته رایج شده، مفهوم تعامل ایمن انسان-ربات ریشه در دهه ۱۹۹۰ دارد. در ابتدا، رباتهای صنعتی برای جلوگیری از جراحات ناخواسته در پشت حفاظها یا سلولهای جدا قرار میگرفتند. پژوهشگران پس از آن به دنبال راههایی برای حذف این موانع بودند تا رباتها بتوانند بدون خطر جدی با انسانها کار کنند.
-
تحقیقات اولیه (دهه ۱۹۹۰)
در اواخر دهه ۱۹۹۰، مؤسسات دانشگاهی مانند مؤسسه فناوری ماساچوست (MIT) و دانشگاه کارنگیملون (Carnegie Mellon) آزمایشهایی بر روی بازوهای محرک با محدودیت توان انجام دادند. این نمونههای اولیه از سنسورهای گشتاور ساده در مفاصل خود برای تشخیص برخورد استفاده میکردند. با این حال، ظرفیت بارگذاری آنها محدود و الگوریتمهای کنترلیشان نسبت به استانداردهای امروزی ابتدایی بود. -
اولین کوباتهای تجاری (اوایل ۲۰۰۰)
در سال ۲۰۰۴، شرکت Universal Robots (UR) محصول UR5 را روانه بازار کرد که اغلب بهعنوان اولین کوبات تجاری موفق شناخته میشود. UR5 که بر روی نرمافزار Matlab-based اجرا میشد، ظرفیت بار ۵ کیلوگرم داشت و از پنل آموزشپذیر بهره میگرفت که به تکنسینها اجازه میداد بدون نیاز به تخصص عمیق در برنامهنویسی آن را راهاندازی کنند. موفقیت UR5 زمینه را برای توسعه سریع سایر شرکتهای رباتیک فراهم کرد. -
گسترش و تنوع (۲۰۱۰–۲۰۱۸)
در طول دهه ۲۰۱۰، کوباتها از لحاظ اندازه، ظرفیت بار، سرعت و توانایی حسگری متنوعتر شدند. شرکت Fanuc سری CR خود را با بینایی یکپارچه معرفی کرد، در حالی که KUKA ربات LBR iiwa («دستیار هوشمند صنعتی») را راهاندازی کرد که در هر مفصل سنسور گشتاور داشت تا تعاملهای بسیار واکنشپذیر را امکانپذیر کند. غولهای تکنولوژی مانند ABB و Kawasaki نیز خطوط کوبات خود را ارائه دادند که هر یک بر جنبههای مختلفی مانند ایمنی، دقت یا ادغام با اکوسیستمهای اتوماسیون موجود تأکید داشتند. -
استانداردها و مقررات صنعتی
با تشخیص نیاز به دستورالعملهای شفاف، سازمان بینالمللی استانداردسازی (ISO) در سال ۲۰۱۶ استاندارد ISO/TS 15066 را منتشر کرد که الزامات ایمنی برای سیستمهای ربات صنعتی همکار را تشریح میکند. این مشخصات فنی سطوح نیرو و فشار مجاز در وظایف تماس انسانی-رباتی را روشن کرده و راه را برای استقرار یکنواختتر کوباتها در سطح جهانی هموار ساخت. -
چشمانداز کنونی (دهه ۲۰۲۰)
امروزه بازار کوباتها گسترده و همچنان در حال رشد است. استارتاپها وارد حوزههای مختلفی شدهاند—برای مثال کوباتهای بسیار کوچک برای کاربردهای رومیزی یا کوباتهای سنگینوزن که میتوانند بارهای ۲۰–۳۰ کیلوگرمی را بهطور ایمن در کنار انسانها جابجا کنند. الگوریتمهای بینایی ماشینی با بهرهگیری از تکنیکهای یادگیری عمیق مدرن امکان شناسایی دقیقتر قطعات و هماهنگی دستوچشم را فراهم آوردهاند. ادغام با محاسبات لبه (edge computing)، تجزیهوتحلیل مبتنی بر ابر و اینترنت اشیاء صنعتی (IIoT) نیز قابلیتهای کوباتها را گسترش داده و آنها را به اجزای ضروری در صنعت چهارم (Industry 4.0) تبدیل کرده است.
مزایای رباتهای همکار (کوبات)
پیادهسازی کوباتها در یک محیط تولید یا خدماتی میتواند منجر به مزایای گستردهای برای شرکتها شود، از جمله افزایش بهرهوری، بهبود رضایت نیروی کار و ارتقای ایمنی. در ادامه برخی از مهمترین مزایا بررسی شدهاند:
۱. افزایش بهرهوری و کارایی
-
کارکرد ۲۴/۷: کوباتها بدون وقفه، خستگی یا نوسان در عملکرد قادر به کار پیوسته هستند. این عملکرد یکنواخت میتواند به افزایش تولید کلی کمک کند، بهویژه در وظایف تکراری مانند بارگیری قطعات، بستن پیچ یا بازرسی کیفیت.
-
تغییر سریع وظایف: به دلیل قابلیت برنامهنویسی آسان و گزینههای ابزار انتهای بازو ماژولار، کوباتها میتوانند به سرعت برای وظایف مختلف پیکربندی مجدد شوند. این انعطافپذیری برای تولیدکنندگانی که تولیدات با تیراژ کم یا تنوع بالا دارند، بسیار ارزشمند است.
-
کاهش زمان چرخه: با اتوماسیون حرکات دقیق و تکراری، کوباتها میتوانند وظایف را سریعتر و با کیفیت یکنواخت انجام دهند. در خطوط مونتاژ قطعات کوچک—مانند صنایع الکترونیک یا کالاهای مصرفی—کوباتها باعث کاهش زمان چرخه و کمینه کردن تغییرپذیری ناشی از نیروی انسانی میشوند.
۲. بهبود ایمنی و شرایط ارگونومیک برای کارکنان
-
کاهش مشکلات ارگونومیک: وظایفی که شامل حرکات تکراری هستند (مانند جابجایی قطعات، بستن پیچ یا بستهبندی) میتوانند منجر به اختلالات عضلانی-اسکلتی در طول زمان شوند. با واگذاری این وظایف به کوباتها، کارگران از آسیبهای فشار تکراری جلوگیری میکنند و میتوانند روی فعالیتهای قابل توجهتر از نظر شناختی تمرکز کنند.
-
حذف وظایف خطرناک: کوباتها میتوانند وظایف در محیطهای خطرناک—مانند معرض بودن به مواد شیمیایی، دماهای بالا یا بارهای سنگین—را با حفظ فاصله ایمن از اپراتورهای انسانی انجام دهند. این موضوع خطر حوادث محل کار و مشکلات بلندمدت سلامتی را کاهش میدهد.
-
جلوگیری از برخورد در زمان واقعی: حتی در فضاهای کاری مشترک، کوباتها به طور پیوسته محیط اطراف خود را تحت نظر دارند. اگر انسان بهطور غیرمنتظره وارد محدوده تعریف شده آنها شود، کوباتها میتوانند سرعت خود را کاهش داده یا متوقف شوند، که احتمال آسیب ناشی از برخورد را به حداقل میرساند.
۳. کاهش موانع ورود به اتوماسیون
-
اقتصادی بودن: در مقایسه با سلولهای ربات صنعتی سنتی—که نیاز به حفاظ ایمنی، پرتوهای نوری و مهندسی تخصصی دارند—کوباتها معمولاً هزینه اولیه کمتری دارند. از این رو، کسبوکارهای کوچک و متوسط با بودجه محدود میتوانند بدون سرمایهگذاریهای کلان وارد حوزه اتوماسیون شوند.
-
برنامهنویسی ساده: رویکرد «راهنمایی دستی» یا رابط کاربری گرافیکی نیاز به متخصصان رباتیک را کاهش میدهد. نگهداری و برنامهنویسی اغلب میتواند توسط کارکنان فنی موجود، مانند سرپرستان خط یا اپراتورهای ماشین، انجام شود.
-
جای پا (Footprint) کمتر: کوباتها معمولاً فضای کمتری نسبت به رباتهای سنتی اشغال میکنند. فرم فاکتور فشرده آنها امکان نصب در فضاهایی را که قبلاً برای راهحلهای اتوماسیون سنتی خیلی تنگ بودند، فراهم میکند.

۴. مقیاسپذیری و آیندهنگری
-
اکوسیستم ماژولار: یک اکوسیستم فزاینده از ابزارهای انتهای بازو، گیرهها و لوازم جانبی شخص ثالث به کوباتها امکان میدهد طیف گستردهای از وظایف را انجام دهند. شرکتها میتوانند با خرید فیxtures یا نرمافزارهای جدید، مقیاس استقرار کوبات خود را افزایش دهند بدون اینکه نیازی به سلولهای اتوماسیون کاملاً جدید باشد.
-
بهروزرسانی نرمافزار: بسیاری از کوباتها با فرمورهایی ارائه میشوند که میتوانند بهصورت over-the-air بهروزرسانی شوند. ویژگیهای جدید—مانند بهبود برنامهریزی حرکت، کتابخانههای بینایی پیشرفته یا پچهای امنیتی—را میتوان بدون جایگزینی سختافزار اضافه کرد و در نتیجه عمر مفید تجهیزات را افزایش داد.
-
بهینهسازی مبتنی بر داده: کوباتهای مدرن اغلب دادههای عملیاتی—زمان چرخه، پروفایلهای نیرو، نرخ تشخیصها—را ضبط میکنند که میتوان آنها را به پلتفرمهای تحلیل داده تغذیه کرد تا تلاشهای بهبود مستمر را هدایت کند. با گذشت زمان، شرکتها میتوانند گردش کارها را بهینهسازی کنند، تغییرپذیری تولید را کاهش دهند و نیازهای نگهداری را دقیقتر پیشبینی کنند.
کاربردهای رایج کوباتها
به دلیل انعطافپذیری و ویژگیهای ایمنی، کوباتها در طیف گستردهای از صنایع به کار گرفته میشوند. در ادامه برخی از رایجترین موارد استفاده آمده است:
۱. مونتاژ و بستن پیچ
در صنایعی مانند الکترونیک، خودروسازی و کالاهای مصرفی بستهبندیشده، مونتاژ دقیق قطعات کوچک کاری تکراری و زمانبر است. کوباتهایی که مجهز به پیچبندهای دارای محدودیت گشتاور هستند، میتوانند پیچها را برداشته، آنها را جاگذاری کرده و دقیقا تا مشخصات تعیینشده محکم کنند. با استفاده از سیستمهای بینایی، کوباتها میتوانند قطعات را روی نقالههای در حال حرکت شناسایی کنند، بردارند و در صورت تغییر جهت قطعه، بهدرستی جاگذاری کنند.
۲. جابجایی مواد و تغذیه ماشین
کوباتها میتوانند قطعات را به ماشینهای CNC، دستگاههای پرس، ماشینهای تزریق پلاستیک یا سایر تجهیزات بارگیری و از آنها خارج کنند. با یکپارچهسازی با فیدرهای قطعه یا سیستمهای جابجایی مبتنی بر بینایی، یک کوبات میتواند قطعه تمامشده را بردارد، بازرسی سریعی انجام دهد و آن را روی نقاله یا درون سبد قرار دهد. این کار باعث افزایش استفاده از ماشین (با کاهش زمانهای بیکاری بین چرخهها) و آزاد شدن اپراتورهای انسانی برای برنامهریزی یا بازرسی کار بعدی میشود.
۳. بازرسی کیفیت و متروژی
کوباتهایی که مجهز به سیستمهای بینایی یا اسکنرهای لیزری هستند میتوانند بازرسی سطح—شناسایی خراشها، فرو رفتگیها یا انحرافات از ابعاد استاندارد—را با سرعتی بسیار بیشتر از بازرسی دستی انجام دهند. آنها همچنین میتوانند پروبها را برای اندازهگیری دقیق هندسه قطعات جابجا کنند. با اتوماسیون کنترل کیفیت، تولیدکنندگان میتوانند نرخ ضایعات را کاهش داده، کیفیت محصول را حفظ کنند و از خطاهای بازرسی انسانی جلوگیری کنند.
۴. بستهبندی، پالت سازی و جداکردن پالت
خطوط بستهبندی با اتوماسیون وظایف تکراری مانند قرار دادن در جعبه، برچسبگذاری و پالتبندی بهشدت بهرهمند میشوند. ابزار انتهای بازو مانند گیرههای وکیوم یا گیرههای مکانیکی تطبیقی میتوانند انواع شکلها و اندازههای جعبه یا محصول را بدون نیاز به تغییر زیاد ابزارها مدیریت کنند. کوباتها الگوهای از پیش تعریفشده را دنبال میکنند تا پالتهای پایدار بسازند یا محمولههای ورودی را باز کنند و به این ترتیب نیروی انسانی در عملیات لجستیک کاهش مییابد.
۵. جوشکاری و لحیمکاری
وظایف جوشکاری کوچک تا متوسط مانند جوشکاری نقطهای، قوس الکتریکی یا حتی جوشکاری در هندسههای پیچیده بهطور فزایندهای به کوباتها واگذار میشود. مشعلهای جوشکاری سبکوزن همراه با حسگرهای نیرو امکان دنبال کردن دقیق درزها را فراهم میکنند. در مونتاژ الکترونیک نیز میتوان رسوب خمیر قلع و جابجایی قطعات مدار چاپی را با استفاده از تنظیمات مبتنی بر کوباتها اتوماسیون کرد.
۶. اتوماسیون آزمایشگاه
در آزمایشگاههای دارویی، بیوتکنولوژی و تحقیقاتی، کوباتها وظایفی مانند جابجایی مایعات، مرتبسازی نمونهها و پویپتینگ تکراری را اتوماسیون میکنند. این نه تنها بهرهوری را افزایش میدهد بلکه آلودگی و خطاهای انسانی را کاهش میدهد. افزون بر این، کوباتها میتوانند با سیستم مدیریت اطلاعات آزمایشگاهی (LIMS) یکپارچه شوند تا نمونهها را در زمان واقعی رهگیری کنند و اطمینان حاصل شود که ردیابی و یکپارچگی دادهها حفظ میشود.
۷. خدمات و مراقبتهای بهداشتی
فراتر از محیطهای صنعتی، کوباتها در نقشهایی مانند لجستیک بیمارستان—حمل دارو، مستندات یا وسایل بین بخشها—خدمت میکنند. برخی کوباتها در فیزیوتراپی بیماران را از طریق تمرینات توانبخشی راهنمایی میکنند و مقاومت را بر اساس بازخورد در زمان واقعی تنظیم میکنند. در صنعت مهماننوازی، کوباتها میتوانند وظایفی مانند تحویل غذا به اتاقها یا نظافت را در محیطهایی که انسانها با لمس مستقیم کارها را انجام میدهند، بر عهده بگیرند.
طراحی ایستگاههای کاری کوبات: ملاحظات و بهترین روشها
اجرای مؤثر کوباتها نیازمند برنامهریزی دقیق است—تا از ادغام بدون مشکل، حداقل تداخل با جریانهای کاری موجود و بیشترین بازگشت سرمایه (ROI) اطمینان حاصل شود.
۱. طراحی فضای کار و ارگونومی
-
تحلیل وظیفه: شناسایی وظایفی که شامل حرکات تکراری، ریسک ارگونومیک بالا یا گلوگاههای تولیدی هستند. این وظایف را برای استقرار کوباتها اولویتبندی کنید.
-
تعریف فضای مشترک انسان-ربات: نواحی را که انسانها و کوباتها بهطور نزدیک با هم تعامل دارند، مشخص کنید. «مناطق عدم تعامل» را تعریف کنید که اگر انسان وارد آنها شود، کوبات باید سرعتش را کاهش دهد یا متوقف شود.
-
نیازهای دسترسی و ظرفیت بار: مدلی از کوبات را انتخاب کنید که دسترسی (reach) و ظرفیت بارش با وظیفه مطابقت داشته باشد. بهعنوان مثال، اگر قطعات ۲ کیلوگرمی را از یک سبد در ارتفاع کمر بردارید، یک کوبات سبکوزن با ظرفیت بار ۶ کیلوگرم و دسترسی ۵۵۰ میلیمتر ممکن است کافی باشد.
۲. ابزار انتهای بازو (EOAT)
-
انتخاب گیره: بسته به هندسه، جنس و شکنندگی قطعه، بین گیرههای وکیوم، گیرههای دو یا سه انگشتی تطبیقی یا گیرههای نرم (مانند سیلیکون یا پلییورتان) تصمیم بگیرید.
-
ابزار سفارشی: برای وظایف بسیار تخصصی—مانند برداشتن قطعات نامنظم ریختهگریشده—ممکن است به EOAT سفارشی نیاز باشد. با تأمینکنندگان EOAT همکاری کنید تا انگشتها، کاپهای مکش یا گیرههای مغناطیسی سفارشی طراحی کنید.
-
سیستمهای تغییر سریع: از سیستمهای تغییر سریع ابزار استفاده کنید تا در هنگام تعویض وظایف، زمان توقف را به حداقل برسانید. برخی تولیدکنندگان کوبات رابطهای تغییر سریع اختصاصی ارائه میدهند تا ادغام بیوقفه را تضمین کنند.
۳. ارزیابی ریسک ایمنی
-
مطابقت با ISO/TS 15066: برای اطمینان از انطباق با ISO/TS 15066 برای هر حالت تعامل—محدودسازی نیرو و توان، توقف تحت نظارت ایمنی، راهنمایی دستی، نظارت بر سرعت و فاصله و حفاظت مبتنی بر منطقه—یک ارزیابی ریسک انجام دهید.
-
حالتهای همکاری: کوباتها حالتهای همکاری مختلفی را پشتیبانی میکنند. بهعنوان مثال، در حالت «راهنمایی دستی»، ربات تنها زمانی حرکت میکند که فرد بهصورت فیزیکی آن را هدایت کند. در حالت «نظارت بر سرعت و فاصله»، کوبات سرعت خود را بر اساس نزدیکی انسانها تنظیم میکند. حالت دلخواه خود را براساس جریان کاری تعریف و برنامهریزی کنید.
-
تکرارپذیری در سنسورها: اگر کوبات در نزدیکی کارکنان بدون آموزش یا در مناطقی با تردد انسانی بالا کار میکند، در نظر داشته باشید ابزارهای ایمنی خارجی—مانند اسکنرهای لیزری یا پوششهای ایمنی—را برای تکمیل سنسورهای داخلی آن اضافه کنید.
۴. برنامهنویسی و ادغام
-
پنل آموزشپذیر در مقابل برنامهنویسی آفلاین: تولیدکنندگان کوچکتر اغلب از پنل آموزشپذیر برای برنامهریزی کوباتها به طور مستقیم در کف کارخانه استفاده میکنند. واحدهای بزرگتر ممکن است از ابزارهای برنامهنویسی آفلاین استفاده کنند که سلول کاری را در محیط دیجیتال شبیهسازی میکنند قبل از استقرار کد در ربات واقعی. برای مقیاس و پیچیدگی خود هردو رویکرد را ارزیابی کنید.
-
اتصال و صنعت ۴.۰: از پروتکلهای ارتباطی استاندارد—مانند Ethernet/IP، PROFINET، OPC UA—برای ادغام کوبات در PLC کارخانه، سیستم اجرای تولید (MES) یا سیستم برنامهریزی منابع سازمانی (ERP) استفاده کنید. تبادل داده در زمان واقعی میتواند به پایش عملکرد، زمانبندی نگهداری و بهینهسازی جریان تولید کمک کند.
-
ادغام بینایی: برای وظایف نیازمند شناسایی قطعه یا تنظیم دقیق، یک سیستم بینایی را ادغام کنید. چه دوربینهای یکپارچه در مفاصل کوبات و چه ایستگاههای بینایی سهبعدی خارجی، بینایی به کوبات امکان میدهد تا به تغییرات قطعه واکنش نشان دهد و هزینههای فیکسچرینگ را کاهش دهد.
۵. مدیریت تغییر و آموزش نیروی کار
-
آموزش اپراتور: حتی اگر کوباتها شهودی باشند، آموزش اپراتورها در مورد عیبیابی پایه، برنامهریزی مجدد و پروتکلهای ایمنی ضروری است. زمان را به آموزش متقابل اختصاص دهید تا چندین نفر توانایی انجام وظایف نگهداری هفتگی یا ماهانه را داشته باشند.
-
فرهنگ همکاری: فضایی را ترویج دهید که کوباتها را بهعنوان همتیمیهایی که به جای تهدید، کمک میکنند، بپذیرد. بر نحوه رهایی انسان از کارهای تکراری یا خطرناک تأکید کنید تا بتوانند در فعالیتهایی خلاقانهتر، نظارتی یا تحلیلی مشارکت کنند.
-
نگهداری و پشتیبانی: یک برنامه نگهداری پیشگیرانه تدوین کنید— بازبینی کابلها، چک کردن عملکرد گیره، بهروزرسانی پچهای نرمافزاری و کالیبره کردن سنسورها. بسیاری از تولیدکنندگان کوبات خدمات تشخیص از راه دور و نگهداری پیشبینیکننده را از طریق اتصال ابری ارائه میدهند.

چالشها و ملاحظات
اگرچه کوباتها مزایای جذابی دارند، شرکتها باید چندین چالش و مشکلات بالقوه را برای اطمینان از استقرار موفق مدیریت کنند.
۱. هزینه اولیه و محاسبه ROI
-
سرمایهگذاری اولیه: اگرچه از سلولهای ربات صنعتی محافظتشده ارزانتر هستند، کوباتها همچنان نیازمند سرمایهگذاری قابل توجه اولیه—برای ربات، لوازم ایمنی، ابزار انتهای بازو، خدمات ادغام و آموزش اپراتور—هستند.
-
دوره بازگشت سرمایه (ROI): دوره بازگشت سرمایه را بر اساس صرفهجویی در نیروی کار، بهبود بهرهوری و کاهش نرخ اسقاط محاسبه کنید. برای عملیاتهای با حجم کم یا ترکیب بالا، دوره بازگشت سرمایه ممکن است طولانیتر باشد نسبت به وظایف تکراری با حجم بالا.
-
هزینههای پنهان: چالشهای نصب—مانند تقویت کف برای تحمل وزن ربات، تأمین منابع برق مطمئن و اطمینان از زیرساخت شبکه کافی برای تبادل داده—را در نظر بگیرید.
۲. ایمنی و خطر وابستگی بیش از حد
-
پیکربندی نادرست مناطق ایمنی: محدودیتهای سرعت بیش از حد سخت یا مرزهای ایمنی بسیار محافظهکارانه میتواند بهرهوری را کاهش دهد. برعکس، پارامترهای ایمنی سهلگیرانه ممکن است ایمنی اپراتور را به خطر بیندازد. یافتن تعادل مناسب حیاتی است.
-
رفتار غیرقابل پیشبینی انسان: کوباتها زمانی بهترین عملکرد را دارند که انسانها از گردش کارهای ثابت پیروی کنند. با این حال، حرکات غیرقابل پیشبینی انسان—مانند اپراتورهایی که از پشت سلول رد میشوند یا بهطور غیرمنتظره در محدوده کوبات وارد میشوند—میتواند منجر به توقفهای اضطراری مکرر و کاهش بهرهوری شود.
-
مسئولیت و مقررات: در بسیاری از حوزهها، مقررات مربوط به فضاهای کاری مشترک و گواهینامههای رباتها به سرعت در حال تکامل هستند. شرکتها باید با قوانین مسئولیت مدنی ملی و محلی هماهنگ بمانند، تحلیلهای خطر را بهطور کامل انجام دهند و تأییدهای ایمنی را مستندسازی کنند.
۳. محدودیتهای فنی و عملیاتی
-
محدودیت در ظرفیت بار و سرعت: اکثر کوباتها ظرفیت بار محدودی در مقایسه با رباتهای صنعتی سنتی دارند. جابجایی قطعات سنگین یا عملیات جابجایی با سرعت بالا ممکن است هنوز نیازمند رباتهای سنتی باشد.
-
محدودیتهای محیطی: کوباتها معمولاً محافظت گستردهای در برابر دماهای شدید، گرد و غبار یا مواد شیمیایی خورنده ندارند. استقرار آنها در محیطهای تولیدی خشن ممکن است نیازمند محفظههای حفاظتی یا پوششهای ویژه باشد.
-
پیچیدگی وظایف مبتنی بر بینایی: پیادهسازی سیستمهای بینایی میتواند چالشبرانگیز باشد—بهویژه در محیطهایی با روشنایی متغیر، سطوح بازتابنده یا تغییر رنگ قطعات. دستیابی به نرخ بالا در برداشتن قطعات با قابلیت اطمینان ممکن است نیاز به تنظیمات و کالیبراسیون فراوان و دخالت انسانی گاهبهگاه داشته باشد.
۴. ادغام با سیستمهای قدیمی
-
مسائل سازگاری: ماشینهای CNC قدیمی، دستگاههای پرس یا خطوط مونتاژ مبتنی بر PLC ممکن است رابطهای دیجیتال نداشته باشند که بهراحتی با کنترلرهای کوبات ارتباط برقرار کنند. برای ادغام، ممکن است لازم باشد سنسورهای جدید نصب کنید، PLC را بهروزرسانی کنید یا ماژولهای واسط ارتباطی اضافه نمایید.
-
جزیرهای شدن دادهها: اگر دادههای تولید در انبارهای اطلاعاتی جداگانه—با MES، ERP، سیستمهای کنترل کیفیت و ماشینهای منفرد—ذخیره شوند، بهینهسازی واقعی در زمان واقعی دشوار میشود. ممکن است شرکتها نیاز داشته باشند در استانداردسازی دادهها و پلتفرمهای محاسبات لبه سرمایهگذاری کنند تا جریانهای اطلاعات را یکپارچه کنند.
استانداردها و گواهیهای ایمنی
تضمین اینکه کوباتها بهطور ایمن در کنار انسان کار میکنند، مستلزم نه تنها ویژگیهای ایمنی ذاتی طراحی بلکه انطباق با استانداردها و گواهیهای صنعتی است. در ادامه دستورالعملها و نهادهای اصلی تنظیمکننده ایمنی کوباتها بررسی میشوند:
۱. ISO/TS 15066:2016
استاندارد ISO/TS 15066 راهنمایی جامعی در مورد سیستمهای ربات صنعتی همکار ارائه میدهد و مکمل سری ISO 10218 (که به ایمنی رباتهای صنعتی بهطور کلی میپردازد) است. عناصر کلیدی شامل موارد زیر هستند:
-
حداکثر نیروی قابل مجاز و سطوح فشار: ISO/TS 15066 سطوح نیروی مجاز برای بخشهای مختلف بدن (مثل سر، قفسه سینه، اندامها) در هنگام تماس با ربات را بر اساس پژوهشهای بیومکانیکی گستردهای مشخص میکند. این آستانهها تضمین میکنند که هیچ تماس تصادفی فراتر از حد درد یا آسیب جدی نباشد.
-
انواع عملیات همکارانه: این مشخصات حالتهای مختلف عملیات همکارانه را دستهبندی میکند—محدودسازی نیرو و توان، راهنمایی دستی، نظارت بر سرعت و فاصله و توقف تحت نظارت ایمنی—که هر کدام دارای مجموعهای از الزامات برای سنسورها، نرمافزار و چیدمان فضای کار هستند.
-
فرآیند ارزیابی ریسک: سازندگان و یکپارچهسازان باید برای هر نصب همکاریجویانهای یک ارزیابی ریسک مستندسازی کنند، خطرات بالقوه را شناسایی کرده، سطح خطر را تخمین بزنند و اقدامات کاهشدهنده (مانند روکشهای حفاظتی، نرده یا پدهای ایمنی) را اجرا کنند.
۲. UL (Underwriters Laboratories) و نشان CE
-
گواهینامه UL: در آمریکای شمالی، UL ارزیابیهای ایمنی سختگیرانهای بر روی سختافزار رباتیک، اجزای الکتریکی و نرمافزار انجام میدهد. یک کوبات دارای گواهی UL آزمایشهای دقیق بهمنظور تأیید انطباق با استانداردهای ایمنی و عملکرد را گذرانده است.
-
نشان CE: در اروپا، نشان CE نشاندهنده انطباق کوبات با الزامات سلامت، ایمنی و حفاظت محیط زیستی اتحادیه اروپا است. این شامل تطابق با دستورالعمل ولتاژ پایین، سازگاری الکترومغناطیسی (EMC) و مقررات ایمنی ماشینآلات (مانند IEC 60204-1) میشود.
۳. مقررات منطقهای و خاص صنعت
-
FDA و تجهیزات پزشکی: در صنایعی مانند تولید دارو یا مراقبتهای بهداشتی، کوباتها ممکن است برای دست زدن به محصولات استریل یا کارهای مواجهه با بیمار، نیاز به تأیید یا مجوز FDA داشته باشند. رعایت اصول خوب تولید (GMP) و استاندارد ISO 13485 (مدیریت کیفیت تجهیزات پزشکی) ممکن است ضروری باشد.
-
استانداردهای خودروسازی: در خطوط مونتاژ خودروسازی، کوباتها معمولاً با جیبهای سنگین، قطعات بزرگ یا کمک به مونتاژ نهایی کار میکنند. گواهینامههای مانند IATF 16949 (مدیریت کیفیت خودروسازی) ممکن است همراه با مقررات ایمنی کارخانهای منطقهای به کار گرفته شوند.
-
مقررات غذا و نوشیدنی: برای وظایفی که به تماس با مواد غذایی مربوط میشوند—مانند چیدن، مرتبسازی یا بستهبندی—کوباتها باید با دستورالعملهای FDA/USDA درباره سطوح تماس مواد غذایی، قابلیت تمیز شدن و جلوگیری از آلودگی مطابقت داشته باشند.
مطالعات موردی واقعی
مطالعه موردی ۱: تولید الکترونیک با Universal Robots
یک تولیدکننده متوسط الکترونیک که بردهای مدار چاپی (PCB) تولید میکرد، با افزایش تقاضا برای محصولات اختصاصی و با تیراژ کم مواجه شد. مونتاژ دستی قطعات ظریف زمانبر بود و نرخ بالایی از آسیبهای فشار تکراری در بین تکنسینها ایجاد میشد. با استقرار یک کوبات UR10e از Universal Robots در یک ایستگاه مجهز به سیستم بینایی، این شرکت وظایف جابجایی قطعات و بازرسی خمیر قلع را اتوماسیون کرد. نتایج کلیدی شامل موارد زیر بود:
-
کاهش ۴۰٪ در زمان چرخه: وظایف اتوماسیونشده جابجایی قطعات، زمان لازم برای قرار دادن قطعات را تقریباً به نصف کاهش داد.
-
بهبود ثبات کیفیت: همترازسازی مبتنی بر بینایی باعث قرارگیری دقیق شد و نرخ اصلاح (rework) را ۲۵٪ کاهش داد.
-
تخصیص مجدد اپراتورها: تکنسینهایی که قبلاً به مونتاژ تکراری اختصاص داشتند، به عنوان ناظران سلولی مجدداً آموزش دیدند و بر کنترل کیفیت و بهبود فرآیند تمرکز کردند.
مطالعه موردی ۲: تأمینکننده قطعات خودرو با KUKA LBR iiwa
یک تأمینکننده قطعات خودرو که در زمینه تولید کالیپرهای ترمز تخصص داشت، قصد داشت فرآیند پولیش پس از ماشینکاری را اتوماسیون کند. قطعات پس از ماشینکاری داغ بودند و شکل نامنظمی داشتند. یک سلول ربات سنتی به حفاظ و فیکسچر پیچیده نیاز داشت. در عوض، شرکت یک کوبات KUKA LBR iiwa با انگشتان نرم پنوماتیک سفارشی را پیادهسازی کرد. نتایج عبارت بودند از:
-
همکاری انسانی-رباتی ایمن: اپراتورها در حالت راهنمایی دستی برای تنظیمات دقیق گیره کوبات را هدایت کردند. پس از تأیید برنامه، کوبات روزانه ۳۰۰۰ قطعه را بدون هیچ حادثه ایمنی انجام داد.
-
کاهش صدمات ارگونومیک: پولیش دستی کارگران را در معرض ابزارهای پرارتعاش و تراشههای فلزی قرار میداد. کوبات این خطرات را حذف کرد و زمان توقف ناشی از خستگی اپراتور را کاهش داد.
-
قابلیت مقیاسپذیری: در عرض شش ماه، خودروساز (OEM) درخواست یک سلول کوبات دوم برای یک خط تولید دیگر را داشت، که نشاندهنده انعطافپذیری راهحل کوبات بود.
مطالعه موردی ۳: اتوماسیون آزمایشگاه در یک استارتاپ بیوتکنولوژی
یک استارتاپ بیوتکنولوژی که در حال توسعه آزمایشهای آنزیمی نوآورانه بود، به پویپتینگ دقیق و تکراری برای غربالگری با حجم بالا نیاز داشت. آزمایشها در ابتدا بهصورت دستی توسط پژوهشگران انجام میشد و این موضوع منجر به تغییرپذیری در نتایج آزمایش میشد. با ادغام یک کوبات Fanuc CR-35iA با بازوی رباتیک جابجایی مایعات و اتصال به LIMS، آزمایشگاه به دستاوردهای زیر رسید:
-
افزایش ظرفیت تولید: کوبات سرعت پردازش صفحههای ۹۶ خانه را ۵۰٪ بیشتر از پویپتینگ دستی فراهم کرد و امکان انجام آزمایشهای بیشتر در هفته را مهیا کرد.
-
ردیابی دادهها بهبود یافته: رهگیری خودکار نمونهها از طریق یکپارچگی با LIMS خطاهای رونویسی را کاهش داد و اطمینان حاصل کرد که دستورالعملهای نظارتی رعایت میشوند.
-
قابلیت تکرارپذیری افزایشیافته: کنترل دقیق حجم و زمانبندی پویپتینگ، قابلیت تکرارپذیری آزمایشها را ۳۰٪ بهبود داد و خط تولید پژوهشی شرکت را تسریع کرد.
جهتگیریها و روندهای آینده
با ادامه تکامل کوباتها، چندین روند و پیشرفت فناوری در حال گسترش قابلیتهای آنها و گسترش کاربردهایشان هستند:
۱. ادغام هوش مصنوعی و یادگیری ماشین
-
یادگیری تطبیقی: کوباتهایی که با الگوریتمهای یادگیری ماشینی تقویت شدهاند، میتوانند به مرور زمان از نمایشهای انسانی «یاد بگیرند». به جای برنامهریزی صریح برای هر حرکت، ممکن است یک ربات از اپراتوری ماهر مشاهده کند که چگونه یک وظیفه را انجام میدهد و سپس بدون دخالت زیاد انسانی آن را بازتولید کند. با گذشت زمان، این کوباتها عملکرد خود را بر اساس حلقههای بازخوردی بهبود میبخشند.
-
نگهداری پیشبینیکننده: جاسازی تجزیهوتحلیلهای مبتنی بر هوش مصنوعی در نرمافزار کنترل کوباتها اجازه میدهد نگهداری پیشبینیکننده را اجرا کنند. با تحلیل الگوهای جریان موتورها، گشتاور مفاصل و دمای عملیاتی، کوباتها میتوانند نقصهای احتمالی—مانند فرسودگی بلبرینگها یا کابل—را روزها یا هفتهها قبل پیشبینی کنند و در نتیجه از خرابیهای ناگهانی جلوگیری کنند.
-
کنترل کیفیت مبتنی بر بینایی: سیستمهای بینایی مجهز به یادگیری عمیق میتوانند نواقص—مانند ریزترکها یا انحرافات رنگی—را تشخیص دهند که سیستمهای قانونمحور معمولی ممکن است از دست بدهند. کوباتهای آینده بینایی پیشرفته را با تصمیمگیری در زمان واقعی ترکیب میکنند تا به طور خودکار قطعات معیوب را تغییر مسیر دهند یا اپراتورها را برای بازرسی دستی هشدار دهند.
۲. قابلیت حرکتی و ناوبری خودکار
-
پلتفرمهای کوبات متحرک: در حالی که کوباتهای امروزی اغلب ثابت یا روی گانتری نصب میشوند، ظهور پلتفرمهای کوبات متحرک—با چرخهای همهجانبه و بینایی درونساز—قول میدهد اتوماسیون همکارانه را به محیطهای پویا بیاورد. تصور کنید کوبات متحرکی که به طور خودکار بین ایستگاههای کاری مختلف جابجا میشود، قطعات را تحویل میدهد، بازرسی انجام میدهد یا ابزارها را حمل میکند.
-
تخصیص وظایف دینامیک: با سیستمهای مدیریت ناوگان یکپارچه، چندین کوبات (چه ثابت و چه متحرک) میتوانند وظایف را به طور پویا هماهنگ کنند. برای مثال، اگر یک سلول برای نگهداری از مدار خارج شود، کوباتهای متحرک میتوانند وظایف را بازتخصیص دهند تا اختلال در تولید به حداقل برسد و بهرهوری کلی را بهینه کنند.
۳. رباتیک نرم و مهارتهای دست انسانی
-
گیرههای نرم: پیشرفتهای در علوم مواد گیرههای نرم و انعطافپذیری تولید کردهاند که به اشیای با شکلهای متنوع—از میوههای حساس تا ریختهگریهای نامنظم—بدون نیاز به همترازسازی دقیق مبتنی بر بینایی میچسبند. این گیرهها همراه با سنسورهای لمسی، به کوباتها امکان میدهند اشیای شکننده یا تغییرشکلپذیر را با مهارتی شبیه انسان جابجا کنند.
-
ادغام با اسکلت بیرونی (Exoskeleton): کوباتهای آینده ممکن است فراتر از بازوها و دستها پیش روند و شامل اسکلت بیرونی پوشیدنی باشند که قدرت یا وضعیت بدنی انسان را طی وظایف همکاری افزایش میدهد. برای مثال، انسانی که اسکلت بیرونی سبکوزن میپوشد میتواند بار یک قطعه سنگین را با کمک کوباتی که آن را همتراز و محکم میکند، تحمل کند و به طور چشمگیری خستگی و ریسک آسیب اپراتور را کاهش دهد.
۴. واسطهای کاربر و ربات یکپارچهتر
-
برنامهنویسی به زبان طبیعی: به جای پنلهای آموزشپذیر یا رابطهای گرافیکی، اپراتورها ممکن است از طریق دستورات صوتی یا واقعیت افزوده (AR) با کوباتها تعامل کنند. تصور کنید که به یک کوبات از طریق هدست بگویید: «اولین قطعه را از سبد بردار و در جیگ قرار بده»—و کوبات بدون هیچ برنامهنویسی صریحی آن دستور را اجرا میکند.
-
واقعیت افزوده برای نگهداری: عینکهای AR میتوانند اپراتورهای نگهداری را از طریق مراحل عیبیابی پیچیده راهنمایی کنند—دادههای تشخیصی در زمان واقعی را روی تصویر قرار میدهند، کابلهایی که باید بررسی شوند را برجسته میکنند یا بصری مشخصات گشتاور را نشان میدهند. این کار زمان توقف را کاهش میدهد و نیاز به دفترچههای راهنمای کاغذی را حذف میکند.
۵. استانداردسازی و رشد اکوسیستم
-
ادغام پلاگاند-پلی (Plug-and-Play): همانطور که شرکتهای بیشتری از استانداردهای ارتباطی مشترک (مانند OPC UA، ROS 2) استفاده میکنند، ادغام کوباتها در اکوسیستمهای اتوماسیون گستردهتر سادهتر خواهد شد. تأمینکنندگان شخص ثالث ماژولهای تأییدشدهای—سیستمهای بینایی، گیرهها، سنسورهای نیرو—تولید خواهند کرد که میتوانند بدون نیاز به پیکربندی مجدد گسترده به هر کوباتی متصل شوند.
-
بازارچه برای برنامههای کوبات: شبیه فروشگاههای اپلیکیشن برای گوشیهای هوشمند، سازندگان ممکن است بستههای کاربردی آماده کوبات را خریداری کنند—برنامههای از پیش توسعهیافته برای وظایف مانند تغذیه مهرهها، چسبکاری یا کیتینگ. این امر زمان استقرار را کاهش میدهد و هزینه سفارشیسازی را پایین میآورد.
۶. تکامل مقررات و تطبیق نیروی کار
-
استانداردهای ایمنی پویاتر: با افزایش تواناییهای کوباتها، استانداردهای ایمنی برای پوشش حالتهای جدید همکاری—مانند وظایف اشتراک نیرو که در آن انسان و ربات همزمان نیرو اعمال میکنند—تکامل خواهند یافت. مقرراتگذاران آستانههای نیروی مجاز و نیازهای هوش ذاتی را بهروزرسانی خواهند کرد تا از ایمنی مداوم اطمینان حاصل شود.
-
ارتقای مهارتها و بازآموزی: با واگذاری وظایف تکراری به کوباتها، کارکنان انسانی به مهارتهای پیشرفتهتر—برنامهنویسی، یکپارچهسازی سیستم، تجزیهوتحلیل داده و بهینهسازی فرآیند—نیاز خواهند داشت. مؤسسات آموزشی و مراکز آموزش حرفهای در حال حاضر در حال معرفی دورههای آموزشی متمرکز بر رباتیک، هوش مصنوعی و تولید دیجیتال برای آمادگی نیروی کار برای محیطهای همکارانه هستند.
غلبه بر موانع استقرار
با وجود پتانسیل عظیم کوباتها، شرکتها باید چندین مانع را برای اطمینان از استقرار موفق مدیریت کنند. در ادامه استراتژیهایی برای مقابله با چالشهای رایج آمده است:
۱. برنامههای پایلوت جامع
-
اثبات مفهوم (PoC): قبل از گسترش در چندین خط، آزمایشهای کوچک مقیاس را برای تأیید عملکرد کوبات زیر شرایط واقعی تولید انجام دهید. شاخصهایی مانند زمان چرخه، بازده کیفیت و حوادث ایمنی را ردیابی کنید. از یک تیم چندمنظوره—شامل مهندسان، پرسنل کیفیت و اپراتورها—برای شناسایی مشکلات احتمالی استفاده کنید.
-
بهبود تکراری: رویکرد پایلوت را بهعنوان یک فرآیند تکراری در نظر بگیرید. پس از استقرار اولیه، بازخورد اپراتورها را جمعآوری کنید، دادههای عملکرد را نظارت کنید و ابزار یا پارامترهای ایمنی را بهینه کنید. این رویکرد ریسک را قبل از سرمایهگذاریهای بزرگ کاهش میدهد.
۲. تعادل بین سفارشیسازی و استانداردسازی
-
طراحی ماژولار: اگرچه مقداری سفارشیسازی اجتنابناپذیر است، سعی کنید EOAT ماژولار را استفاده کنید که بتوان آن را در وظایف مختلف استفاده مجدد کرد. برای مثال، استفاده از انگشتهای قابل تنظیم یا کاپهای مکش قابل تعویض میتواند نیاز به ساخت گیره کاملاً جدید برای هر خانواده قطعه را کاهش دهد.
-
پروتکلهای ارتباطی استاندارد: اطمینان حاصل کنید کوباتها و تجهیزات پشتیبان—سیستمهای بینایی، نقالهها، PLCها—از پروتکلهای استاندارد استفاده میکنند. این موضوع زمان ادغام را کاهش داده و از وابستگی به تأمینکننده خاص جلوگیری میکند.
۳. مشارکت نیروی کار و مدیریت تغییر
-
شمول زودهنگام: اپراتورها و تکنسینهای نگهداری را از مراحل اولیه استقرار درگیر کنید. نظرات آنها را در مورد مشکلات فعلی—ریسکهای ارگونومیک، وظایف تکراری یا گلوگاهها—جلب کنید تا آنها حس مالکیت نسبت به راهحل اتوماسیونی جدید پیدا کنند.
-
توسعه مهارتهای تدریجی: بهجای تغییرات ناگهانی، ماژولهای آموزشی طبقهبندیشده ارائه دهید—ابتدا ایمنی و کارکرد پایه، سپس برنامهنویسی، عیبیابی و تجزیهوتحلیل داده. این اطمینان را میدهد که کارکنان با هر مسئولیت جدید راحت هستند.
۴. چارچوب بازگشت سرمایه (ROI)
-
برآورد هزینه جامع: هنگام محاسبه ROI، نه تنها صرفهجوییهای مستقیم (ساعات نیروی کار، کاهش ضایعات) بلکه منافع غیرمستقیم—بهبود کیفیت (کاهش بازگشت مشتری)، ارتقای روحیه کارکنان، کاهش غیبت به دلیل آسیب و سرعت بیشتر ورود به بازار—را در نظر بگیرید.
-
شاخصهای کلیدی عملکرد (KPI) و پایش مداوم: شاخصهای کلیدی عملکرد را از پیش تعریف کنید—مانند OEE (کارایی کلی تجهیزات)، MTBF (میانگین زمان بین خرابیها) یا نرخ حوادث ایمنی—و آنها را بهطور مداوم نظارت کنید. از این دادهها برای توجیه سرمایهگذاریهای بیشتر و شناسایی فرصتهای بهبود مستمر استفاده کنید.
ملاحظات اخلاقی و اجتماعی
با نفوذ کوباتها در خطوط تولید و محیطهای خدماتی، سؤالهای اخلاقی و اجتماعی در مورد اشتغال، ایمنی کارکنان و هنجارهای تعامل انسان-ماشین مطرح میشوند.
۱. تأثیر بر اشتغال
-
جایگزینی شغل در مقابل تحول شغلی: در حالی که برخی نگران هستند که کوباتها شغلها را از بین ببرند، شواهد نشان میدهند که اغلب شغلها را به جای حذف، تحول میبخشند. کارکنان به جای انجام وظایف تکراری، به نظارت، برنامهنویسی و نگهداری کوباتها روی میآورند. با این حال، شرکتها و سیاستگذاران باید اطمینان حاصل کنند که کارکنان جابهجا شده آموزشهای لازم برای مشاغل جدید را دریافت میکنند.
-
دسترسی عادلانه به اتوماسیون: شرکتهای کوچک و متوسط ممکن است در رقابت با شرکتهای بزرگتری که منابع لازم برای استقرار و ادغام کوبات را دارند، با مشکل مواجه شوند. کمکهای دولتی، وامهای کمبهره یا تأسیس مراکز مشترک رباتیک (هابهای منطقهای اتوماسیون) میتوانند این فاصله را کاهش دهند و از افزایش اختلاف بهرهوری جلوگیری کنند.
۲. رفاه و همکاری کارکنان
-
پذیرش روانی: مطالعات نشان میدهند که کارکنان زمانی استقبال بیشتری از کوباتها دارند که آموزش کافی ببینند و به ویژگیهای ایمنی ربات اعتماد کنند. ارتباط شفاف در مورد هدف کوباتها—تأکید بر کمکرسانی به جای جایگزینی—فرهنگ همکاری را ترویج میکند. کارگاههای آموزشی منظم، جلسات باز و نمایشهای عملی میتوانند اعتماد را ایجاد کنند و نگرانیها را کاهش دهند.
-
طراحی فراگیرانه: نیازهای کارکنان گوناگون—افرادی با محدوده حرکتی محدود، قدهای متفاوت یا ناتوانیهای جسمی—را هنگام طراحی ایستگاههای کاری مشترک در نظر بگیرید. میزهای قابل تنظیم ارتفاع، گیرههای تطبیقی و چیدمانهای واسط انسان-ماشین قابل شخصیسازی اطمینان میدهند که همه اپراتورها میتوانند بهطور مؤثر در کنار کوباتها کار کنند.
۳. حریم خصوصی دادهها و امنیت سایبری
-
حفاظت از مالکیت فکری: کوباتهایی که به تجزیهوتحلیل مبتنی بر ابر یا خدمات نظارت از راه دور متصل هستند ممکن است دادههای حساس تولید (مانند فرآیندهای اختصاصی، شاخصهای کیفیت) را منتقل کنند. شرکتها باید رمزگذاری قوی، پروتکلهای احراز هویت امن و کنترل دسترسی مبتنی بر نقش را برای حفاظت از مالکیت فکری پیاده کنند.
-
مقاومت در برابر تهدیدات سایبری: با تبدیل شدن کوباتها به دستگاههای شبکهای در شبکه کف کارخانه، آنها تبدیل به اهداف احتمالی حملات سایبری میشوند. یک کوبات مختلشده میتواند باعث توقف تولید یا حتی حوادث ایمنی شود. بازرسیهای منظم امنیتی، مدیریت پچهای فرمور و معماریهای شبکه تفکیکشده (مانند جداسازی فناوری عملیاتی از فناوری اطلاعات) ضروری هستند.
پایداری و تأثیر محیطی
کوباتها میتوانند با بهینهسازی استفاده از منابع، کاهش ضایعات و بهبود بهرهوری انرژی به اهداف پایداری کمک کنند.
۱. کاهش ضایعات مواد
-
جابجایی دقیق: با حفظ کیفیت یکنواخت جابجایی و مونتاژ قطعات، کوباتها میزان ضایعات قطعات را کاهش میدهند. این موضوع بهویژه در صنایع با دقت بالا مانند الکترونیک تاثیرگذار است.
-
تولید بر اساس نیاز: توانایی انجام تولید با تیراژ کم و تغییر سریع وظایف به تولیدکنندگان امکان میدهد دقیقاً آنچه را که نیاز است و زمانی که نیاز است تولید کنند، که در نتیجه موجودی اضافی را کاهش داده و از منسوخ شدن جلوگیری میکند.
۲. بهرهوری انرژی
-
مصرف برق کمتر: بسیاری از کوباتها از موتورهای DC بدون جاروبک (BLDC) و مواد سبکوزن استفاده میکنند که مصرف انرژی کمتری نسبت به مدلهای قدیمیتر ربات دارند. در هزاران ساعت عملیاتی، این صرفهجویی انرژی تجمعی قابل توجه است.
-
مدیریت توان در حالت انتظار: کوباتها میتوانند در دورههای بیکاری به حالت کممصرف یا خواب بروند. نرمافزار زمانبندی هوشمند تضمین میکند که آنها تنها درست قبل از شروع وظیفه روشن شوند و مصرف انرژی در حالت آمادهباش را کاهش دهد.
۳. ملاحظات چرخه عمر
-
مواد قابل بازیافت: تولیدکنندگان پیشرو کوباتها را به گونهای طراحی میکنند که دارای اجزای قابل بازیافت یا قابل استفاده مجدد—مانند فریمهای آلومینیومی یا الکترونیک ماژولار—باشد تا بازیافت در پایان عمر دستگاه را سادهتر کند.
-
مدیریت چرخه عمر نرمافزار: کوباتهایی که از بهروزرسانیهای Over-the-Air پشتیبانی میکنند، طول عمر سختافزار را با افزودن ویژگیهای جدید بدون نیاز به واحدهای فیزیکی جدید افزایش میدهند. این امر ضایعات الکترونیکی مرتبط با از رده خارج شدن زودهنگام سختافزار را کاهش میدهد.
شاخصها برای ارزیابی عملکرد کوبات
برای اطمینان از اینکه استقرار کوباتها منافع وعده دادهشده خود را ارائه میدهند، سازمانها باید شاخصهای خاصی را رصد کنند:
۱. شاخصهای بهرهوری
-
کاهش زمان چرخه: زمان لازم برای انجام یک وظیفه خاص قبل و بعد از ادغام کوبات را اندازهگیری کنید. کاهش مداوم زمان چرخه نشاندهنده بهبود کارایی است.
-
افزایش خروجی: تعداد واحدهای تولیدشده در هر شیفت یا هر ساعت را ردیابی کنید. خروجی بالاتر اغلب با کاهش گلوگاههای انسانی و عملکرد یکنواخت ربات مرتبط است.
۲. کیفیت و نرخ نقص
-
نرخ تولید اولیه (First-Pass Yield): درصد قطعاتی که در بار اول با استانداردهای کیفیت مطابقت دارند را ارزیابی کنید. بهبود نرخ تولید اولیه نشان میدهد که کوباتها وظایف را با ثبات بیشتری انجام میدهند.
-
نرخ اصلاح و اسقاط: حجم و هزینه قطعاتی که نیاز به اصلاح دارند یا بهطور کامل اسقاط میشوند را ردیابی کنید. روند نزولی نشاندهنده تأثیر مثبت کوبات بر قابلیت اطمینان فرآیند است.
۳. ایمنی و ارگونومی
-
نرخ حوادث قابل ثبت (Recordable Incident Rate – RIR): تعداد جراحات محل کار را قبل و بعد از استقرار کوبات ردیابی کنید. کاهش قابل توجه در RIR نشاندهنده افزایش ایمنی است.
-
امتیازات ریسک ارگونومیک: از ابزارهای استاندارد ارزیابی ارگونومیک (مانند RULA، REBA) برای کمّیسازی سطوح خطر استفاده کنید. کوباتها باید بهبود قابل توجهی در این امتیازات برای وظایف خود ایجاد کنند.
۴. بهرهبرداری و زمان توقف
-
درصد آپتایم (Uptime): درصد زمانی که کوباتها در حال کار هستند را در مقابل زمانی که برای نگهداری یا توقفهای نامناسب در حالت بیکار هستند اندازهگیری کنید. برای سلولهای بهخوبی مدیریتشده، هدف آپتایم ۹۰–۹۵٪ است.
-
میانگین زمان بین خرابیها (MTBF): از دادههای حسگر و سوابق نگهداری برای محاسبه MTBF استفاده کنید. MTBF بالاتر نشاندهنده طراحی مقاوم و شیوههای نگهداری پیشگیرانه است.
۵. بازگشت سرمایه (ROI)
-
دوره بازگشت سرمایه: کل هزینههای پیادهسازی (ربات، ادغام، آموزش) را بر صرفهجوییهای سالانه در نیروی کار و سربار تقسیم کنید. دوره بازگشت سرمایه زیر دو سال عموماً برای SMEs مطلوب تلقی میشود.
-
کل هزینه مالکیت (TCO): علاوه بر هزینههای خرید، هزینههای نگهداری، مصرف انرژی، تعویض ابزار و هزینههای مجوز نرمافزار را برای دوره ۵–۷ ساله محاسبه کنید. این مقدار را با ارزش مورد انتظار حاصل از بهبود بهرهوری و کاهش ریسکها مقایسه کنید.
تحقق وعده رباتهای همکار (کوبات)
رباتهای همکار نمایانگر تحولی عمیق در نحوه همزیستی اتوماسیون با نیروی انسانی هستند. روزهایی که کارخانهها با حفاظهای غیربرقی از هم جدا میشدند و تیترهای «ربات در برابر انسان» بر صفحه اخبار غالب بود، سپری شده است. کوباتهای امروزی طوری طراحی شدهاند که مهارتهای انسانی را کامل کنند—نه جایگزین آنها—و اتوماسیونی دموکراتیک برای سازمانهای با اندازههای مختلف فراهم سازند.
گامهای کلیدی برای پذیرش موفق
-
همسو کردن با اهداف کسبوکار: پیش از معرفی کوباتها، اهداف خود—چه کاهش هزینه نیروی کار، افزایش خروجی، بهبود کیفیت یا ارتقای ایمنی—را مشخص کنید. همسو کردن پروژه کوباتی با اهداف استراتژیک، حمایت ذینفعان را تضمین کرده و نقشه راه روشنی برای اندازهگیری موفقیت فراهم میسازد.
-
اجرای پایلوتهای جامع و اثبات مفهوم: استقرارهای کوچک مقیاس بهعنوان نقاط اثبات عمل میکنند. دادههای عملکرد واقعی را جمعآوری کنید، از بازخورد اپراتورها استفاده کنید و ادغام را قبل از گسترش بهینهسازی کنید. از درسهای آموختهشده برای ایجاد یک الگوی قابل تکرار برای سلولهای آینده بهره ببرید.
-
اولویت دادن به ایمنی و انطباق: از ارزیابیهای ریسک ISO/TS 15066، گواهیهای UL/CE و مقررات منطقهای برای طراحی ایستگاههای کاری استفاده کنید که همواره انسان و ربات را ایمن نگه دارد. تأییدهای ایمنی خود را مستندسازی کنید و ارتباط شفاف با نهادهای نظارتی محلی حفظ کنید.
-
سرمایهگذاری در توسعه نیروی کار: آموزشهای عملی برای اپراتورها، تکنسینهای نگهداری و مهندسان فراهم کنید. فرهنگ یادگیری مادامالعمر را با ارائه دورههای پیشرفته در زمینه برنامهنویسی ربات، تجزیهوتحلیل داده و ادغام سیستمها ترویج دهید. داستانهای موفقیت را برای افزایش انگیزه و کاهش مقاومت به اشتراک بگذارید.
-
ایجاد اکوسیستم قابل مقیاس: سختافزار و نرمافزار کوبات را انتخاب کنید که بتواند باتوجه به نیازهای آینده مجدداً استفاده یا ارتقا یابد. پروتکلهای ارتباطی، رابطهای ابزار انتهای بازو و کنترلکنندههای ایمنی را استاندارد کنید تا گسترشهای آینده سادهتر شود.
-
بهرهگیری از داده برای بهبود مستمر: ابزارهای پایش را پیادهسازی کنید تا زمان چرخه، پروفایلهای نیرو، شاخصهای کیفیت و سایر شاخصهای عملکرد را ضبط کنند. از این دادهها برای شناسایی گلوگاهها، تنظیم پارامترهای فرآیند و پیشبینی نیازهای نگهداری استفاده کنید. تصمیمگیری مبتنی بر داده، در طول زمان بازده بیشتری خواهد داشت.
مشارکت انسان و کوبات
پیشرفت واقعی رباتهای همکار در اتوماسیون وظایف نهفته نیست، بلکه در شکلدهی یک مشارکت همآفرینانه بین انسان و ماشین نهفته است. با اتوماسیون وظایف کسالتآور، خطرناک یا دارای ریسک ارگونومیک بالا، کوباتها اپراتورهای انسانی را آزاد میکنند تا در فعالیتهای ارزشمندتری—مانند حل مسئله، طراحی خلاقانه، تضمین کیفیت و نوآوری فرآیند—مشارکت کنند. در عوض، انسانها هوش زمینهای، تخصص حوزه و قضاوت اخلاقی را فراهم میکنند که ماشینها هنوز قادر به تکرار کامل آن نیستند.
در صنایعی که از خودروسازی تا الکترونیک، از داروسازی تا صنایع غذایی را در بر میگیرد، رباتهای همکار در حال حاضر بهرهوری، ایمنی و بهبود کیفیت را به ارمغان آوردهاند. اما این مسیر هنوز به پایان نرسیده است. با پیشرفت هوش مصنوعی، فناوریهای حسگری و استانداردها، کوباتها بهطور روزافزون جهانشمولتر، خودرانتر و دروناکوسیستمهای دیجیتال ادغامشدهتر خواهند شد. واسطهای واقعیت افزوده، ناوگان کوباتهای متحرک و ابزار انتهای بازوی رباتیک نرم چارچوب امکانات را دگرگون خواهند کرد.
در نهایت، انقلاب کوباتها درباره جایگزینی کارکنان نیست؛ بلکه درباره توانمندسازی آنهاست. اپراتورهای ماهر در کنار ماشینهای هوشمند کار خواهند کرد، با بهرهگیری از دادههای زمان واقعی و اتوماسیون تطبیقی تا مرزهای نوآوری را جابجا کنند. شرکتهایی که این رویکرد انسانمحور به اتوماسیون را در پیش میگیرند، برتری استراتژیکی کسب خواهند کرد: نیروی کار ایمنتر، پربازدهتر و مجهزتر به مواجهه با آینده.

نتیجهگیری
رباتهای همکار (کوباتها) نقطه عطفی در تکامل اتوماسیون صنعتی و خدماتی هستند. با ترکیب حسگری پیشرفته، برنامهنویسی شهودی و طراحی انسانمحور، کوباتها شکاف بین سیستمهای اتوماسیون سنتی و فناوریهای کاملاً خودمختار را پر میکنند. آنها عصر جدیدی را آغاز میکنند که در آن ماشینها و انسانها در هماهنگی کار میکنند—هر یک نقاط قوت دیگری را تکمیل میکنند تا به نتایجی دست یابند که هیچکدام به تنهاممکن نیست.
در این پست وبلاگ، مسیر تکامل کوباتها از نمونههای اولیه پژوهشی اولیه تا سیستمهای هوشمند مجهز به هوش مصنوعی امروز را بررسی کردیم. ویژگیهای اساسی، استانداردهای ایمنی و کاربردهای متداول آنها در تولید، مراقبتهای بهداشتی، لجستیک و فراتر از آن را بررسی کردیم. همچنین چالشهای استقرار—از محاسبه ROI تا آموزش نیروی کار—را مورد بحث قرار دادیم و مطالعات موردی واقعی را که نشاندهنده منافع قابل اندازهگیری در بهرهوری، کیفیت و ایمنی هستند، برجسته کردیم.
با نگاه به آینده، پیشرفتها در یادگیری ماشینی، سیستمهای بینایی، رباتیک نرم و واسطهای انسان-ماشین، همچنان قابلیتهای کوباتها را گسترش میدهد. خطوط بین رباتها و انسانها بیش از پیش محو خواهد شد و رباتهای همکار در فضاهایی قرار خواهند گرفت که بیشتر سازگار، شهودی و به شکلی بیدرنگ در اکوسیستمهای دیجیتال ادغام شدهاند. با این حال، یک اصل ثابت باقی میماند: مؤثرترین اتوماسیون آن است که انسانها را توانمند میکند تا بهترین کار خود را انجام دهند.
برای شرکتهایی که به دنبال حفظ رقابت در بازاری هستند که بهطور فزایندهای جهانی و فناوریمحور است، کوباتها مسیر جذابی ارائه میدهند. با انتخاب دقیق پلتفرمهای کوبات، اجرای برنامههای پایلوت جامع، اطمینان از رعایت استانداردهای ایمنی و سرمایهگذاری در توسعه نیروی کار، سازمانها میتوانند پتانسیل کامل همکاری انسان-ربات را آزاد کنند. در این مسیر، نه تنها بهرهوری و کیفیت را ارتقا خواهند داد، بلکه فرهنگی از نوآوری را نیز پرورش خواهند داد—فرهنگی که در آن انسانها و ماشینها در کنار هم ارزش خلق میکنند.
بهعنوان چشمانداز کوباتها همچنان تکامل مییابد، بهروز بودن در مورد روندهای نوظهور، بهترین روشها و پیشرفتهای فناوری حیاتی است. با پذیرش ذهنیتی مبتنی بر بهبود مستمر و با تقویت گفتگوی باز بین اپراتورها، مهندسان و مدیریت، کسبوکارها میتوانند وعده واقعی رباتهای همکار را تحقق بخشند. آینده کار دیگر نبرد انسان و ربات نیست؛ بلکه همکاری انسان و ربات است که در کنار هم به اوجهایی دست مییابند که هرگز پیش از این تصور نمیشد.
خرید دوربین صنعتی و دوربین هوشمند از وب سایت هایک ربات
منبع: wire





