ساختار ربات صنعتی: نگاهی عمیق به ستون فقرات اتوماسیون مدرن

رباتهای صنعتی ستون فقرات اتوماسیون مدرن هستند و نقش اساسی در افزایش کارایی، دقت و بهرهوری در تولید ایفا میکنند. با این حال، آنچه ربات صنعتی را بسیار متنوع و مؤثر میسازد، نه تنها نرمافزار…
رباتهای صنعتی ستون فقرات اتوماسیون مدرن هستند و نقش اساسی در افزایش کارایی، دقت و بهرهوری در تولید ایفا میکنند. با این حال، آنچه ربات صنعتی را بسیار متنوع و مؤثر میسازد، نه تنها نرمافزار یا هوش آنها، بلکه ساختار فیزیکی آنهاست. ساختار ربات صنعتی محدوده حرکت، ظرفیت بار، دقت و مناسب بودن آن برای وظایف مختلف را تعیین میکند. درک ساختارهای مختلف ربات برای انتخاب تجهیزات مناسب برای کاربردهای صنعتی خاص ضروری است.
در این پست، ما ساختارهای ربات صنعتی، اصول طراحی آنها و نقش آنها در صنایع مختلف را بررسی خواهیم کرد. از سیستمهای مفصلی تا چارچوبهای همکاری، این راهنما پیشرفتهترین و پرکاربردترین ساختارهای ربات در چشمانداز صنعتی را پوشش خواهد داد.
مقدمهای بر ساختار ربات صنعتی
رباتهای صنعتی در شکلها و اندازههای مختلفی وجود دارند که هر کدام برای انجام وظایف خاصی در محیطهای تولیدی طراحی شدهاند. ساختار یا پیکربندی مکانیکی یک ربات، قابلیتهای آن را تعیین میکند. چه مونتاژ الکترونیکهای پیچیده باشد، جوشکاری فریمهای خودرو یا بستهبندی کالا، ساختار یک ربات مناسب بودن آن برای وظیفه مورد نظر را تعیین میکند.
در چند دهه گذشته، پیشرفتهای تکنولوژیکی و افزایش تقاضا برای اتوماسیون منجر به توسعه چندین ساختار ربات متمایز شده است. این ساختارها اغلب بر اساس پیکربندی فیزیکی، درجه آزادی (DOF) و قابلیتهای حرکتی طبقهبندی میشوند.
درک این ساختارهای ربات برای صنایعی که به دنبال اجرای اتوماسیون در خطوط تولید خود هستند ضروری است. انتخاب ساختار ربات مناسب میتواند منجر به افزایش کارایی، کاهش هزینهها، بهبود دقت و افزایش ایمنی شود.
انواع ساختار ربات صنعتی
ربات مفصلی
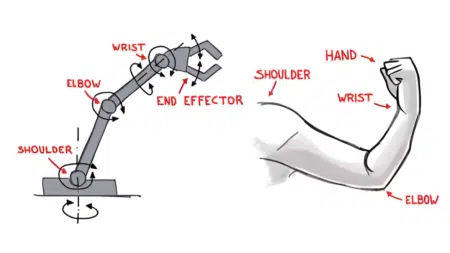
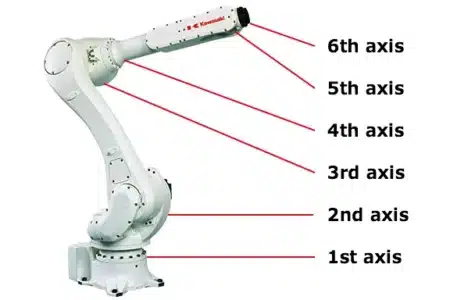
رباتهای مفصلی شاید شناختهشدهترین نوع ربات صنعتی باشند. این رباتها دارای اتصالات چرخشی (همچنین به عنوان محور شناخته میشوند) هستند که به بازوها اجازه میدهند با درجه بالایی از انعطافپذیری و دامنه حرکت کنند. معمولاً رباتهای مفصلی بین چهار تا شش محور دارند، اگرچه برخی مدلها ممکن است بسته به کاربرد، محورهای بیشتری داشته باشند. محورها توسط یک سری مفصل به هم متصل میشوند که حرکت بازوی انسان را تقلید میکنند و چابکی عالی را فراهم میکنند.
ویژگیهای کلیدی:
درجه آزادی: بالا، معمولاً 6 محور.
انعطافپذیری: میتواند در چندین صفحه بچرخد و آنها را برای کارهای پیچیده ایدهآل میکند.
کاربردها: جوشکاری، جابجایی مواد، مراقبت از ماشینآلات و مونتاژ. مثال: FANUC M-20iA یک ربات مفصلی بسیار متنوع است که برای کارهایی مانند جوشکاری قوس الکتریکی و جابجایی مواد استفاده میشود و قادر به بلند کردن تا 20 کیلوگرم با برد بیش از 1800 میلیمتر است.
ربات SCARA
رباتهای SCARA (بازوی ربات مفصلی انطباقی انتخابی) در حرکات افقی بسیار تخصصی هستند و آنها را برای کارهای مونتاژ ایدهآل میسازند. رباتهای SCARA دارای یک محور عمودی سفت و سخت هستند، اما محورهای افقی آنها انعطافپذیر هستند و حرکات جانبی سریع و دقیقی را امکانپذیر میسازند. آنها به طور گسترده در کاربردهایی که نیاز به عملیات برداشتن و قرار دادن با سرعت بالا دارند استفاده میشوند.
ویژگیهای کلیدی:
درجه آزادی: معمولاً 4 محور.
سرعت: حرکات افقی با سرعت بالا.
کاربردها: مونتاژ، بستهبندی و عملیات برداشتن و قرار دادن. مثال: رباتهای Adept Cobra SCARA به دلیل دقت در مونتاژ قطعات کوچک و تولید الکترونیک شناخته شدهاند و سرعت و تکرارپذیری استثنایی را ارائه میدهند.
ربات دلتا
رباتهای دلتا به دلیل سرعت و دقت خود در جابجایی اجسام سبک شناخته شدهاند. این رباتها دارای سه بازو هستند که به یک پایه واحد متصل شدهاند و یک پیکربندی مثلثی تشکیل میدهند. ساختار منحصر به فرد آنها به آنها اجازه میدهد تا عملیات برداشتن و قرار دادن با سرعت بالا و با دقت فوقالعادهای انجام دهند و آنها را برای کارهایی در صنایع غذایی، الکترونیک و داروسازی ایدهآل میسازد.
ویژگیهای کلیدی:
درجه آزادی: معمولاً 4 محور.
سرعت: سرعت بسیار بالا در کارهای برداشتن و قرار دادن.
کاربردها: مرتبسازی، بستهبندی و مونتاژ با سرعت بالا. مثال: ABB FlexPicker IRB 360 یکی از محبوبترین رباتهای دلتا است که قادر به انجام تا 150 برداشت در دقیقه در کاربردهای بستهبندی است.
ربات دکارتی
رباتهای دکارتی (همچنین به عنوان رباتهای گانتری شناخته میشوند) با استفاده از یک سیستم حرکت خطی در امتداد سه محور عمود بر هم (X، Y و Z) کار میکنند. ساختار دکارتی آنها را بسیار دقیق و تکرارپذیر میکند و برای کاربردهایی که نیاز به حرکت خطی دارند ایدهآل است. این رباتها معمولاً در ماشینهای CNC، چاپ سه بعدی و سایر کاربردهایی که دقت در امتداد مختصات تعریف شده حیاتی است استفاده میشوند.
ویژگیهای کلیدی:
درجه آزادی: 3 محور (X، Y، Z).
دقت: دقت بالا در حرکت خطی.
کاربردها: ماشینکاری CNC، چاپ سه بعدی و جابجایی مواد. مثال: رباتهای دکارتی IAI به طور گسترده در جابجایی مواد، مونتاژ و کاربردهای موقعیتیابی دقیق استفاده میشوند و پیکربندیهای قابل سفارشیسازی را برای مناسب بودن طیف وسیعی از وظایف ارائه میدهند.
ربات استوانهای
رباتهای استوانهای دارای یک پایه چرخشی و یک مفصل منشوری هستند که حرکت خطی را در یک سیستم مختصات استوانهای امکانپذیر میسازد. این رباتها کمتر از انواع دیگر رایج هستند اما اغلب در کاربردهایی استفاده میشوند که نیاز به حرکات خطی ساده همراه با حرکت چرخشی دارند.
ویژگیهای کلیدی:
درجه آزادی: معمولاً 3 محور.
حرکت: پایه چرخشی با امتداد خطی.
کاربردها: مراقبت از ماشینآلات، جابجایی مواد و مونتاژ.
ربات کروی
رباتهای کروی دارای یک بازوی چرخان هستند که در اطراف یک سیستم مختصات کروی حرکت میکند. آنها شبیه به رباتهای استوانهای هستند اما حرکت چرخشی گستردهتری را ارائه میدهند. این رباتها اغلب در کاربردهایی استفاده میشوند که نیاز به حرکات گسترده در یک فضای محدود دارند.
ویژگیهای کلیدی:
درجه آزادی: معمولاً 3 محور.
کاربردها: جوشکاری، جابجایی مواد و مونتاژ.
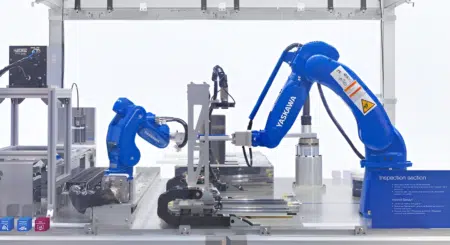
ربات همکار (کوباتها)
رباتهای همکاری (کوباتها) برای کار در کنار انسانها در فضاهای کاری مشترک طراحی شدهاند. برخلاف رباتهای صنعتی سنتی که اغلب به دلیل سرعت و قدرت خود در قفسهای ایمنی محدود میشوند، کوباتها دارای ویژگیهای ایمنی داخلی مانند فناوری محدودکننده نیرو و سنسورهایی هستند که به آنها اجازه میدهد حضور انسان را تشخیص داده و از برخورد جلوگیری کنند. کوباتها معمولاً دارای ساختارهای انعطافپذیری هستند که ایمنی و انطباقپذیری را در اولویت قرار میدهند.
ویژگیهای کلیدی:
ایمنی: سنسورهای داخلی برای تعامل ایمن انسان و ربات.
انعطافپذیری: معمولاً سبک وزن و آسان برای برنامهریزی مجدد.
کاربردها: مونتاژ، بازرسی کیفیت، جابجایی مواد. مثال: UR10 یونیورسال ربات یک کوبات محبوب است که در صنایع مختلف برای کارهایی مانند بستهبندی، مونتاژ و مراقبت از ماشینآلات استفاده میشود. این ربات میتواند بارهایی تا 10 کیلوگرم را جابجا کند و برای استقرار سریع با حداقل برنامهنویسی طراحی شده است.

اجزای کلیدی ساختار ربات صنعتی
ساختار یک ربات صنعتی از چندین جزء کلیدی تشکیل شده است که با هم کار میکنند تا وظایف را با سرعت، دقت و قابلیت اطمینان انجام دهند. درک این اجزا برای انتخاب ربات مناسب برای کاربرد شما ضروری است.
مفاصل و محورها
مفاصل (همچنین به عنوان محور شناخته میشوند) حرکت یک ربات را تعریف میکنند. هر مفصل یک درجه آزادی را فراهم میکند و تعداد مفاصل معمولاً بین سه تا شش متغیر است، اگرچه برخی رباتها ممکن است بیشتر داشته باشند. مفاصل میتوانند چرخشی (اجازه حرکت چرخشی) یا خطی (اجازه حرکت خط مستقیم) باشند.
اثرگذارهای انتهایی
اثرگذار انتهایی ابزاری است که به انتهای بازوی یک ربات متصل میشود و با محیط تعامل میکند. اثرگذارهای انتهایی میتوانند اشکال مختلفی داشته باشند، از جمله گیرهها، مشعلهای جوشکاری، کاپهای خلا و موارد دیگر. انتخاب اثرگذار انتهایی کاملاً به وظیفهای که ربات قرار است انجام دهد بستگی دارد.
موتورها و محرکها
موتورها و محرکها مسئول حرکت مفاصل ربات هستند. این اجزا انرژی الکتریکی را به حرکت مکانیکی تبدیل میکنند و به ربات اجازه میدهند تا وظایف را انجام دهد. انواع مختلفی از موتورها، مانند سرو موتورها و موتورهای پلهای، بسته به دقت و سرعت مورد نیاز ربات استفاده میشوند.
تجزیه و تحلیل دقیق ساختارهای محبوب ربات
نقاط قوت و ضعف رباتهای مفصلی
نقاط قوت:
انعطافپذیری و دامنه حرکت بالا. قابلیت انجام کارهای پیچیده مانند جوشکاری و رنگآمیزی. همه کاره و قابل انطباق با صنایع مختلف. نقاط ضعف:
فضای اشغالی بزرگتر نسبت به سایر انواع ربات. هزینه بالاتر به دلیل پیچیدگی.
کاربردهای رباتهای SCARA
رباتهای SCARA در موارد زیر بسیار خوب عمل میکنند:
کارهای مونتاژ با سرعت بالا. عملیات برداشتن و قرار دادن. کارهای دقیق در تولید الکترونیک و دستگاههای پزشکی.
مزایای رباتهای دلتا در کاربردهای با سرعت بالا
رباتهای دلتا بسیار سریع هستند و آنها را برای موارد زیر ایدهآل میسازند:
بستهبندی در صنایع غذایی و نوشیدنی. کارهای مرتبسازی در لجستیک. مونتاژ با سرعت بالا در الکترونیک.
چرا رباتهای دکارتی در محیطهای صنعتی محبوب هستند
رباتهای دکارتی برای موارد زیر ترجیح داده میشوند:
دقت آنها در کارهایی مانند ماشینکاری CNC و چاپ سه بعدی. برنامهریزی و کنترل آسان در کارهای خطی ساده. طراحی قابل تنظیم برای کاربردهای خاص.
عوامل قابل توجه هنگام انتخاب ساختار ربات
ظرفیت بار
ظرفیت بار به حداکثر وزنی اشاره دارد که یک ربات میتواند بلند کند. انتخاب ربات با ظرفیت بار مناسب برای جلوگیری از اضافه بار ساختار و به خطر انداختن عملکرد بسیار مهم است.
دامنه حرکت
دامنه حرکت باید با کارهایی که ربات انجام خواهد داد همسو باشد. به عنوان مثال، رباتهای مفصلی دامنه حرکتی گستردهای را ارائه میدهند و آنها را برای کارهای پیچیده مناسب میسازند، در حالی که رباتهای SCARA برای حرکات جانبی ایدهآل هستند.
دقت و تکرارپذیری
برای کارهایی که نیاز به دقت بالا دارند، مانند مونتاژ الکترونیک یا ماشینکاری CNC، دقت و تکرارپذیری یک ربات عوامل حیاتی هستند. رباتهای دکارتی و دلتا به دلیل دقت بالای خود شناخته شدهاند.
فضای اشغالی و نیازهای فضای کاری
فضای اشغالی یک ربات به مقدار فضایی اشاره دارد که اشغال میکند. در محیطهایی که فضا محدود است، ساختارهای ربات جمعوجور مانند SCARA یا دلتا ممکن است نسبت به سیستمهای مفصلی بزرگتر مناسبتر باشند.
روندهای نوظهور در ساختار ربات صنعتی
ساختارهای ربات مدولار
رباتهای مدولار امکان پیکربندیهای سفارشی را فراهم میکنند و به تولیدکنندگان اجازه میدهند با اضافه یا حذف ماژولها، ربات را با کارهای مختلف تطبیق دهند.
رباتیک نرم
رباتیک نرم یک حوزه نوظهور است که بر ایجاد رباتهایی با ساختارهای انعطافپذیر و نرم تمرکز دارد و آنها را برای کارهای ظریف مانند دست زدن به اشیاء شکننده در صنایع غذایی یا پزشکی ایدهآل میسازد.
رباتهای همکاری سبک وزن
کوباتهای سبک وزن به دلیل قابلیت حمل، سهولت استفاده و توانایی کار ایمن در کنار انسانها در محیطهای مختلف، محبوبیت فزایندهای پیدا میکنند.
نتیجهگیری
رباتهای صنعتی طی سالها به طور قابل توجهی تکامل یافتهاند و ساختارهای آنها پیچیدهتر و قابل انطباقتر با نیازهای تولید مدرن شده است. چه رباتهای مفصلی بسیار انعطافپذیر، سیستمهای دکارتی دقیق یا کوباتهای انسانپسند، انتخاب ساختار ربات مناسب میتواند خطوط تولید را متحول کند، کارایی را بهبود بخشد و هزینهها را کاهش دهد.
با پیشرفت تکنولوژی، میتوانیم انتظار نوآوریهای جدید در ساختارهای ربات را داشته باشیم که مرزهای اتوماسیون را بیشتر پیش خواهد برد. از طراحیهای مدولار تا رباتیک نرم، آینده ساختارهای ربات صنعتی آماده است تا صنایع را حتی بیشتر متحول کند.
با درک نقاط قوت و ضعف ساختارهای مختلف ربات، صنایع میتوانند تصمیمات آگاهانهای اتخاذ کنند که بهرهوری را به حداکثر رسانده و رشد را در عصر تولید هوشمند هدایت کنند.
منبع:





