قطعات ربات صنعتی: راهنمای جامع

قطعات ربات صنعتی: راهنمای جامع رباتهای صنعتی به یکی از ارکان اصلی تولید مدرن تبدیل شدهاند و نقشهای حیاتی در صنایعی از جمله تولید خودرو تا مونتاژ الکترونیک ایفا میکنند. توانایی آنها در انجام کارهای…
قطعات ربات صنعتی: راهنمای جامع
رباتهای صنعتی به یکی از ارکان اصلی تولید مدرن تبدیل شدهاند و نقشهای حیاتی در صنایعی از جمله تولید خودرو تا مونتاژ الکترونیک ایفا میکنند. توانایی آنها در انجام کارهای تکراری با دقت، سرعت و کارایی، خطوط تولید را در سراسر جهان متحول کرده است. با این حال، پشت عملکرد روان این سیستمهای رباتیک، شبکهای پیچیده از اجزا وجود دارد که به طور هماهنگ کار میکنند. درک قطعات ربات صنعتی برای هر کسی که در زمینه رباتیک، اتوماسیون یا تولید مشغول به کار است، ضروری است.
در این مقاله، به بررسی قطعات ربات صنعتی خواهیم پرداخت و اجزای اساسی که این ماشینهای پیچیده را تشکیل میدهند، مورد تحلیل قرار خواهیم داد. تا پایان این راهنما، شما شناخت جامعی از نحوه کار رباتهای صنعتی و نقش هر بخش در عملکرد کلی آنها خواهید داشت.
معرفی رباتهای صنعتی
رباتهای صنعتی ماشینهایی قابل برنامهریزی هستند که میتوانند به طور خودکار یا نیمهخودکار وظایف مختلفی را انجام دهند. این رباتها به منظور افزایش بهرهوری، کاهش خطای انسانی و انجام کارهای خطرناک یا تکراری در محیطهای تولیدی طراحی شدهاند. آنها مجهز به چندین بخش هستند که هر یک در حرکت، دقت و عملکرد کلی آنها نقش دارند.
رباتهای صنعتی معمولاً بر اساس ساختار، درجه آزادی و کاربردشان طبقهبندی میشوند. برخی از انواع رایج شامل رباتهای مفصلی، رباتهای SCARA (بازوی مونتاژ با انعطاف انتخابی)، رباتهای دلتا و رباتهای کارتزین هستند. با این حال، صرف نظر از نوع، همه رباتهای صنعتی مجموعهای از اجزای مشترک دارند که در ادامه به تفصیل بررسی خواهیم کرد.
چرا رباتهای صنعتی مهم هستند؟
رباتهای صنعتی به طور قابل توجهی هزینه تولید را کاهش داده و کیفیت محصول را بهبود میبخشند. آنها در صنایع مختلفی از جمله خودروسازی، الکترونیک، فلزکاری، فرآوری مواد غذایی و داروسازی مورد استفاده قرار میگیرند. این رباتها قادر به انجام وظایفی مانند جوشکاری، نقاشی، مونتاژ، جداسازی، برداشتن و قرار دادن محصولات و بستهبندی هستند.
قطعات اصلی یک ربات صنعتی
اگرچه رباتهای صنعتی از نظر طراحی و هدف متفاوت هستند، همه آنها از اجزای اصلی مشابهی تشکیل شدهاند که به آنها امکان عملکرد مؤثر را میدهند. این اجزا عبارتند از:
1-مکانیزم/بازو
2-اند افکتور
3-عملگرها
4-سنسورها
5-کنترلر
6-منبع تغذیه
7-پندنت آموزشی
بیایید نگاهی دقیقتر به هر یک از این اجزا بیندازیم.
1- مکانیزم/بازو
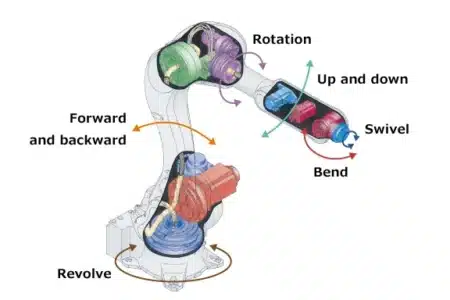
قابل تشخیصترین بخش یک ربات صنعتی، مکانیزم یا همان بازوی ربات یا بازوی رباتیک است. این ساختار مکانیکی مسئول حرکت و موقعیتدهی به اند افکتور (ابزار) ربات است. مکانیزم شامل چندین لینک (بدنههای صلب) و مفاصل (عملگرهای چرخشی یا خطی) است که به ربات درجات مختلفی از آزادی (DOF) میدهند. هرچه درجات آزادی ربات بیشتر باشد، ربات در انجام وظایف پیچیدهتر، انعطافپذیرتر و متنوعتر خواهد بود.
برای مثال، یک ربات مفصلی معمولاً دارای شش درجه آزادی است که به آن اجازه میدهد در سه بعد (بالا/پایین، چپ/راست، جلو/عقب) حرکت کند و حول سه محور (پیچ، یاو، و رول) بچرخد.
2- اند افکتور
اند افکتور ابزاری است که به انتهای بازوی ربات متصل شده و برای تعامل با محیط استفاده میشود. نوع اند افکتور بسته به کاربرد ربات متفاوت است. اند افکتورهای رایج شامل موارد زیر هستند:
– گریپرها: برای برداشتن و قرار دادن اشیا استفاده میشوند.
– مشعلهای جوشکاری: برای فرآیندهای جوشکاری در تولید.
– فنجانهای مکشی: برای جابجایی اشیا صاف یا هموار.
– اسپریگانها: برای نقاشی یا پوششدهی.
– پیچگوشتیها و دریلها: برای عملیات مونتاژ.
اند افکتور نقش حیاتی در توانایی ربات برای انجام وظایف خاص ایفا میکند و باید با دقت بر اساس مواد، وزن و نیازهای دقت کار انتخاب شود.
3- عملگرها
عملگرها مسئول حرکت دادن مفاصل ربات و امکانپذیر ساختن حرکت هستند. آنها انرژی الکتریکی، هیدرولیکی یا پنوماتیکی را به حرکت مکانیکی تبدیل میکنند. سه نوع اصلی عملگر در رباتهای صنعتی وجود دارد:
– عملگرهای الکتریکی: رایجترین نوع عملگرها هستند که دقت بالا و کنترل بر سرعت و گشتاور را ارائه میدهند. این عملگرها اغلب در رباتهای کوچک تا متوسط استفاده میشوند.
– عملگرهای هیدرولیکی: در رباتهایی که به نیروی بالا و قدرت نیاز دارند، مانند آنهایی که در بلند کردن یا پرسهای سنگین استفاده میشوند.
– عملگرهای پنوماتیکی: در کاربردهایی که سرعت بیشتر از نیرو اهمیت دارد، مانند عملیات برداشتن و قرار دادن، استفاده میشوند.
انتخاب عملگر بستگی به کاربرد، نیازهای بار و محیط عملیاتی ربات دارد.
4-سنسورها
سنسورها چشمها و گوشهای یک ربات صنعتی هستند و بازخورد حیاتی از محیط و عملیات آن ارائه میدهند. دادههایی که توسط سنسورها جمعآوری میشود توسط سیستم کنترل ربات برای تنظیم حرکات آن و اطمینان از عملکرد ایمن و دقیق استفاده میشود. انواع رایج سنسورهای مورد استفاده در رباتهای صنعتی شامل موارد زیر هستند:
– سنسورهای موقعیت: این سنسورها بازخوردی از موقعیت و جهت مفاصل و اند افکتور ربات ارائه میدهند.
– سنسورهای نیرو/گشتاور: این سنسورها نیروها و گشتاورهای اعمال شده در طول عملیات را اندازهگیری میکنند تا اطمینان حاصل شود که ربات فشار یا نیروی زیادی اعمال نمیکند.
– سنسورهای مجاورت: این سنسورها حضور اشیا در نزدیکی ربات را تشخیص میدهند و به آن اجازه میدهند از برخوردها جلوگیری کند و به صورت ایمن عمل کند.
– سنسورهای بصری: این سنسورها از دوربینها و الگوریتمهای پردازش تصویر برای شناسایی اشیا، خواندن بارکدها یا هدایت ربات در وظایف مونتاژ پیچیده استفاده میکنند.
سنسورها نقش مهمی در هوشمندتر شدن و انعطافپذیرتر شدن رباتهای صنعتی مدرن دارند. با نظارت مداوم بر عملکرد ربات، این سنسورها به جلوگیری از خطاها و بهبود کارایی کمک میکنند.
5- کنترلر
کنترلر مغز ربات صنعتی است. این بخش حرکات ربات را مدیریت میکند، دادههای سنسورها را پردازش میکند و با سیستمهای خارجی ارتباط برقرار میکند. کنترلرها معمولاً از طریق نرمافزارهای تخصصی برای انجام وظایف خاص برنامهریزی میشوند. آنها از الگوریتمها برای محاسبه حرکات لازم و دستورات برای عملگرها استفاده میکنند تا این حرکات به دقت اجرا شوند.
کنترلرهای رباتهای مدرن اغلب بسیار پیشرفته هستند و قادر به ادغام با سیستمهای اتوماسیون پیچیده، پردازش دادهها در زمان واقعی و تصمیمگیری بر اساس بازخورد سنسورها هستند. این کنترلرها معمولاً شامل یک میکروپروسسور، حافظه و سیستمهای ورودی/خروجی (I/O) هستند.
6-منبع تغذیه
منبع تغذیه انرژی لازم برای عملکرد اجزای ربات را تأمین میکند. بسته به نوع ربات، منبع تغذیه ممکن است انرژی الکتریکی، هیدرولیکی یا پنوماتیکی فراهم کند. بیشتر رباتهای مدرن از نیروی الکتریکی استفاده میکنند، زیرا کنترل آن آسانتر و برای طیف گستردهای از کاربردها کارآمدتر است.
در سیستمهای هیدرولیکی یا پنوماتیکی، منبع تغذیه شامل پمپها، شیرآلات و کمپرسورهایی است که فشار مایع یا هوای لازم برای حرکت عملگرها را فراهم میکنند.
7-پندنت آموزشی
پندنت آموزشی یک دستگاه دستی است که توسط اپراتورها برای برنامهریزی و کنترل ربات استفاده میشود. این دستگاه به کاربران اجازه میدهد تا به صورت دستی ربات را از طریق حرکات هدایت کرده و این حرکات را در حافظه آن ثبت کنند. این حرکات ثبتشده توسط ربات در طول عملیات خودکار آنها تکرار میشود.
پندنتهای آموزشی برای تنظیم وظایف، عیبیابی و ایجاد تغییرات در برنامه ربات ضروری هستند. پندنتهای مدرن دارای رابطهای کاربری لمسی و نرمافزارهای کاربرپسند هستند که برنامهریزی وظایف پیچیده را بدون نیاز به دانش گسترده برنامهنویسی آسانتر میکنند.
تجزیه و تحلیل دقیق قطعات ربات صنعتی
اکنون که نمای کلی از اجزای اصلی داریم، بیایید به برخی از بخشهای حیاتی که این سیستمها را تشکیل میدهند، عمیقتر نگاه کنیم.
1-مفاصل ربات
مفاصل ربات نقاط محوری هستند که به مکانیزم اجازه حرکت میدهند. آنها بر اساس نوع حرکتی که فراهم میکنند دستهبندی میشوند:
– مفاصل چرخشی (مفاصل انقلابی): این مفاصل حرکت چرخشی حول یک محور ثابت را فراهم میکنند. آنها رایجترین نوع مفصل در رباتهای مفصلی هستند.
– مفاصل خطی: این مفاصل حرکت خطی در طول یک مسیر مستقیم را فراهم میکنند. آنها معمولاً در رباتهای کارتزین استفاده میشوند.
– مفاصل منشوری: اینها نوع خاصی از مفاصل خطی هستند که حرکت لغزشی در طول یک محور را فراهم میکنند.
هر مفصل به مجموع درجات آزادی ربات کمک میکند و تعیین میکند که ربات چقدر در انجام وظایف انعطافپذیر و متنوع است.
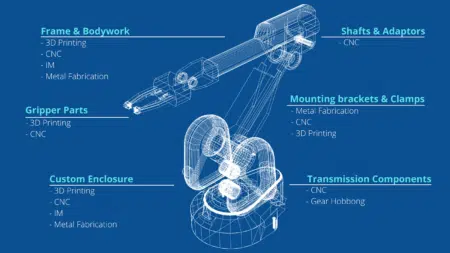
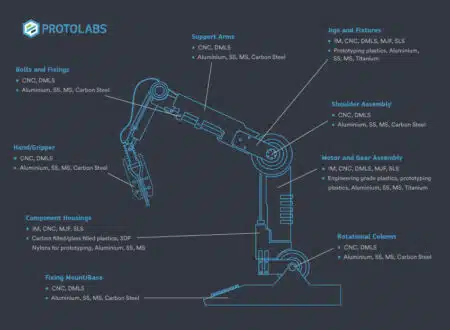
2- لینکهای ربات
لینکهای ربات بخشهای صلبی هستند که مفاصل را به هم متصل میکنند و ساختار بازوی ربات را تشکیل میدهند. این لینکها میتوانند از نظر طول و شکل متفاوت باشند، بسته به طراحی و کاربرد موردنظر ربات. لینکها اغلب از مواد سبک اما مقاوم مانند آلومینیوم یا فولاد ساخته میشوند تا دوام را بدون قربانی کردن سرعت یا دقت تضمین کنند.
3- سیمکشی و سیستمهای ارتباطی
سیمکشی و سیستمهای ارتباطی یک ربات صنعتی تضمین میکنند که سیگنالهای الکتریکی، دادهها و انرژی به طور کارآمد بین کنترلر، عملگرها، سنسورها و سایر اجزا منتقل میشوند. این سیستمها برای عملکرد هماهنگ ربات حیاتی هستند. رباتهای مدرن اغلب از پروتکلهای ارتباطی مانند اترنت، CAN bus یا پروتکلهای اختصاصی برای اطمینان از انتقال سریع و قابل اعتماد دادهها استفاده میکنند.
انواع رباتهای صنعتی و قطعات ربات صنعتی
رباتهای صنعتی در اشکال و اندازههای مختلفی طراحی شدهاند تا نیازهای خاص تولیدی را برآورده کنند. ساختار و اجزای ربات میتواند بسته به نوع آن متفاوت باشد. بیایید برخی از رایجترین انواع رباتهای صنعتی را بررسی کنیم.
1-ربات مفصلی
رباتهای مفصلی رایجترین نوع رباتهای صنعتی هستند. آنها دارای مفاصل چرخشی هستند که به آنها اجازه میدهد در چندین محور حرکت کنند، معمولاً شش محور. این رباتها شبیه بازوی انسان هستند و دارای شانه، آرنج و مچ هستند که به آنها درجه بالایی از انعطافپذیری میدهد.
– اجزای کلیدی: مفاصل چرخشی متعدد، عملگرهای الکتریکی و کنترلرهای پیشرفته.
– کاربردها: جوشکاری، مونتاژ، جابجایی مواد و نقاشی.
2- ربات SCARA
رباتهای SCARA (بازوی مونتاژ با انعطاف انتخابی) ساختار سفتتری نسبت به رباتهای مفصلی دارند و دارای دو مفصل چرخشی موازی هستند که به آنها اجازه میدهد در صفحه X-Y حرکت کنند. آنها به دلیل سرعت و دقت خود در وظایفی که نیاز به حرکت افقی دارند، شناخته شدهاند.
– اجزای کلیدی: دو مفصل چرخشی موازی، یک عملگر عمودی و سنسورهای دقیق.
– کاربردها: برداشتن و قرار دادن، مونتاژ و بستهبندی.
3- رباتهای کارتزین
رباتهای کارتزین، که به نام رباتهای گانتری نیز شناخته میشوند، بر روی یک چارچوب خطی ساخته شدهاند که در امتداد محورهای X، Y و Z حرکت میکنند. این رباتها معمولاً برای وظایفی که نیاز به دقت بالا در یک فضای کاری مستطیلی دارند، استفاده میشوند.
– اجزای کلیدی: مفاصل خطی، عملگرهای منشوری و یک چارچوب صلب.
– کاربردها: ماشینکاری CNC، چاپ سهبعدی و جابجایی مواد.
4- ربات دلتا
رباتهای دلتا برای وظایف برداشتن و قرار دادن با سرعت بالا طراحی شدهاند. آنها دارای ساختاری عنکبوتمانند با سه بازو هستند که به یک پایه مرکزی متصل شدهاند و به آنها امکان حرکت سریع در فضای سهبعدی را میدهد.
– اجزای کلیدی: بازوهای موازی، عملگرهای سبکوزن و کنترلرهای سریع.
– کاربردها: بستهبندی مواد غذایی، داروسازی و مونتاژ الکترونیک.
5- ربات همکار (کوباتها)
رباتهای همکار یا کوباتها برای کار ایمن در کنار انسانها طراحی شدهاند. آنها مجهز به سنسورها و ویژگیهای ایمنی پیشرفته هستند که به آنها اجازه میدهد حضور انسان را تشخیص دهند و از برخوردها جلوگیری کنند.
– اجزای کلیدی: سنسورهای نیرو/گشتاور، سیستمهای بصری و کنترلرهای ایمنی.
– کاربردها: مونتاژ، بازرسی کیفیت و جابجایی مواد در محیطهایی با حضور کارگران انسانی.

نگهداری و تعمیرات اجزای ربات
نگهداری رباتهای صنعتی برای اطمینان از طول عمر و عملکرد آنها ضروری است. نگهداری منظم شامل روانکاری مفاصل، بررسی سیمکشی، کالیبره کردن سنسورها و بهروزرسانی نرمافزار است. عیبیابی شامل تشخیص مشکلات اجزایی مانند عملگرها یا سنسورها و رفع خطاهای ارتباطی بین کنترلر و اجزای ربات میشود.
در اینجا چند نکته کلیدی برای نگهداری آورده شده است:
– نگهداری عملگرها: بررسی ساییدگی و پارگی در موتورهای الکتریکی، پمپهای هیدرولیک و سیستمهای پنوماتیک. اطمینان از روانکاری مناسب و تعویض قطعات فرسوده.
– کالیبراسیون سنسورها: به طور مرتب سنسورها را کالیبره کنید تا از بازخورد دقیق و جلوگیری از خرابی اطمینان حاصل شود.
– بهروزرسانی نرمافزار کنترلر: نرمافزار ربات را به طور منظم بهروزرسانی کنید تا از بهبودهای عملکردی و رفع ایرادات امنیتی بهرهمند شوید.
– بازرسی سیمکشی: به طور مرتب سیمکشی ربات را برای علائم ساییدگی، آسیب یا اتصالات شل که میتواند بر ارتباط یا انتقال نیرو تأثیر بگذارد، بررسی کنید.
روندهای آینده در اجزای رباتهای صنعتی
با پیشرفت مداوم فناوری، اجزای تشکیلدهنده رباتهای صنعتی نیز تغییر میکنند. برخی از روندهای قابل توجه شامل موارد زیر است:
– ادغام AI و یادگیری ماشینی: کنترلرهای پیشرفته به طور فزایندهای با هوش مصنوعی ادغام خواهند شد تا به رباتها امکان یادگیری از تجربیات و بهبود عملکرد خود را بدهند.
– سنسورهای هوشمندتر: توسعه سنسورهای پیچیدهتر مانند سیستمهای بصری سهبعدی و سنسورهای نیرویی مبتنی بر AI، توانایی رباتها را در کار در محیطهای پویا افزایش خواهند داد.
– مواد سبکتر: استفاده از مواد سبکتر و مقاومتر در لینکها و فریمهای رباتها باعث ایجاد رباتهای سریعتر و کارآمدتر از نظر مصرف انرژی خواهد شد.
– رشد رباتهای همکار: با بهبود ویژگیهای ایمنی، شاهد حضور بیشتر کوباتها در کنار انسانها در صنایع مختلف خواهیم بود.
نتیجهگیری
رباتهای صنعتی ماشینهای بسیار پیچیدهای هستند که از اجزای مختلفی تشکیل شدهاند و به طور هماهنگ برای انجام وظایف با دقت و کارایی کار میکنند. از مکانیزم و اند افکتور گرفته تا کنترلر و سنسورها، هر بخش نقش حیاتی در عملکرد کلی ربات ایفا میکند.
درک اجزای رباتهای صنعتی برای هر کسی که در زمینه رباتیک، تولید یا اتوماسیون مشغول به کار است، ضروری است. چه شما در حال نگهداری یک ربات موجود باشید یا در طراحی یک سیستم جدید، شناخت اجزای این ماشینها به شما کمک میکند تا تصمیمات آگاهانهای بگیرید و عملکرد را بهینه کنید.
با پیشرفت فناوری، انتظار میرود که نوآوریهای بیشتری در طراحی و عملکرد رباتهای صنعتی رخ دهد و چشمانداز تولید را بیش از پیش متحول کند.
منبع:
The Main Components of an Industrial Robot





